Safety Oracle
This document is a comprehensive summary of safety oracles, finality detection mechanisms of CBC Casper.
(See this slide for a general introduction of CBC Casper and this post about finality detection in CBC Casper.)
We introduce various existing proposals on safety oracles, describe the algorithms, and compare them.
The goal of this project is here.
Table of Contents
Definitions
t: Byzantine (or equivocation) fault tolerance.
CAN_ESTIMATE: The candidate estimate.
ADV_ESTIMATE: The estimate that the adversary wants to finalize.
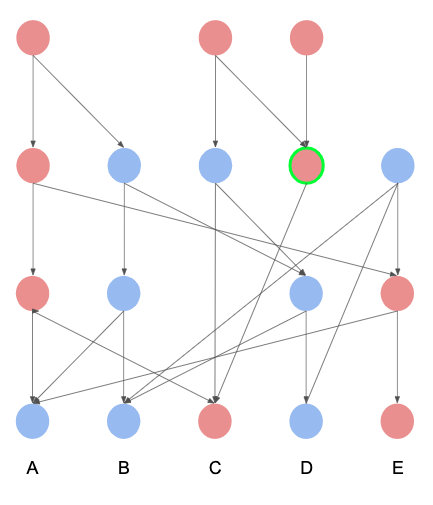
MessageDAG
MessageDAG is a DAG (directed acyclic graph) of messages where edges are directed from a message to the messages in its justification.
Message types
Example
Notations
V: The number of validators.
M: The number of messages(vertices) in the MessageDAG.
J: The number of edges in the MessageDAG.
In practice, we can assume that V <= M <= J <= MV.
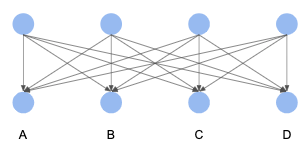
Lobbying Graph
We construct a lobbying graph G(V, E) as follows.
-
Let
Vbe a set of validators that estimatesCAN_ESTIMATEin their latest message andGbe a directed graph with a set of verticesV. -
An edge is directed from
v1tov2that satisfies the following conditions.- v1 ≠ v2
- The justification of the latest message of
v1includes a message ofv2 - The justification of the latest message of
v2includes a message ofv1 - The latest message of
v2in the justification of the latest message ofv1does not conflict withCAN_ESTIMATE - The latest message of
v1in the justification of the latest message ofv2does not conflict withCAN_ESTIMATE - No message conflicts with
CAN_ESTIMATEamong the messages ofv2thatv1have not seen yet - No message conflicts with
CAN_ESTIMATEamong the messages ofv1thatv2have not seen yet
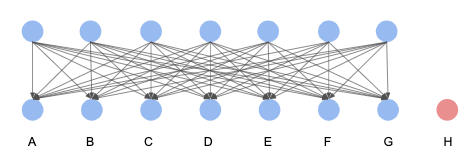
Example
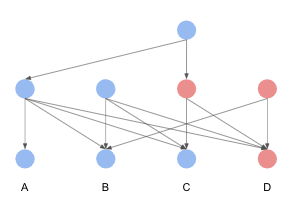
The lobbying graph constructed from the above MessageDAG is:
Complexity
| Construct | Update for a new message | |
|---|---|---|
| Time | O(V^2 + VM) | O(V) |
| Space | O(V^2) | - |
In 2, it requires O(1) time on average to check if the justification of a message includes another validator using a hash table.
For each validator, it requires O(M) to get the latest messages of the other validators (to check if the latest message conflicts with CAN_ESTIMATE).
Therefore, the overall complexity is O(VM).
However, if you keep the lobbying graph and update every time you receive a message, this process can be improved.
It only requires O(V) to update the graph in receiving a message because the number of newly connected edges in the MessageDAG is at most V for a message.
The space complexity is O(V^2) because E is O(V^2) for any graph. Of course, the space complexity of the MessageDAG is O(J). However, a validator must always have it, so we do not consider it's space in safety oracles.
Clique Oracle
The clique oracle is a family of algorithms to find a clique of validators.
2-round Clique Oracle
This oracle is the most naive clique oracle which tries to find a maximal weight clique.
Algorithm
-
Construct the lobbying graph or get it.
-
Convert the lobbying graph to an undirected graph by connecting vertices (validators) connected bidirectionally.
-
Find the maximum weighted clique
CofGin exponential time. -
Byzantine fault tolerance is
t = ceil(W(C) - W(V)/2) - 1. (q > n/2 + t)
See: https://en.wikipedia.org/wiki/Clique_problem#Finding_maximum_cliques_in_arbitrary_graphs
Metrics
| From scratch | For a new message | |
|---|---|---|
| Time complexity | exponential | exponential |
| Space complexity | - | - |
Finding a clique requires O*(2^V) time. Even the fastest algorithm requires O*(1.1888^V). ( O*(f(k)) = O(f(k) poly(x)) )
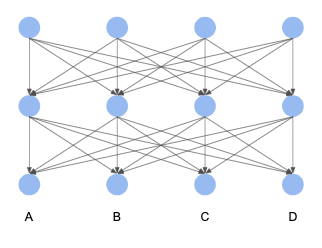
Why q > n/2 + t?
q > n/2 + t, so t < q - n/2.
In the above case, n = 8, q = 7, t < 7 - 8/2 = 3.
This result means that up to t-1=2 equivocation failures can be tolerated.
2 equivocating validators:
3 equivocating validators:
Therefore, the clique oracle fault tolerant threshold formula is not q > n/2 + t/2.
When satisfying the formula q > n/2 + t/2, t < 2q - n = 14 - 8 = 6.
Turán Oracle
Turán theorem
This theorem gives a lower bound on the size of a clique in graphs. If a graph has many edges, it contains a large clique.
Let G be any graph with n vertices, such that G is K_{r+1}-free graph that does not contain (r+1)-vertex clique.
The upper bound of the number of edges is
 .
.
Let E be the set of edges in G.
r is a lower bound on the size of a clique in graphs with n vertices and |E| edges.
Algorithm
-
Construct the lobbying graph or get it.
-
Convert the lobbying graph to an undirected graph by connecting edges (validators) connected bidirectionally.
-
Calculate the minimum size of the maximum weighted clique using the above formula in
O(1)time. -
Calculate the maximum weighted clique
C. -
t = ceil(W(C) - W(V)/2) - 1. (q > n/2 + t)
Metrics
| From scratch | For a new message | |
|---|---|---|
| Time complexity | O(V^2 + VM) | O(1) |
| Space complexity | O(V^2) | - |
Finality Inspector
Simple Inspector
The Simple Inspector is a generalization of 2-round clique oracle.
Algorithm
- Construct the lobbying graph G or get it.
- Let
q > n/2 + t. - Compute outdegree of vertices in G.
C = V- Look for the vertice with outdegree of
qor less inC, remove it fromC, and update the outdegree counters. - Repeat 5.
- If
W(C) >= q, the property is considered finalized.
Metrics
| From scratch | For a new message | |
|---|---|---|
| Time complexity | O(V^2 + VM) | O(V^2) |
| Space complexity | O(V^2) | - |
Inspector
Algorithm
See: https://hackingresear.ch/cbc-inspector/
For some q (<= V), the algorithm needs to find the maximum t.
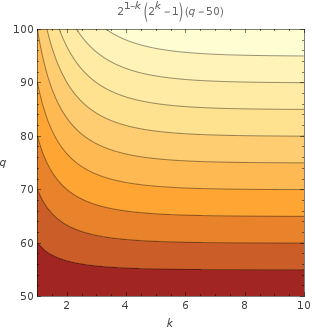
This image is the contour plot about t where n = 100.
Computing the levels takes V times at worst, and the computation runs in O(J) time.
Therefore the total time complexity is O(V * V * J) = O(V^2J).
Metrics
| From scratch | For a new message | |
|---|---|---|
| Time complexity | O(V^2J) | O(V^2J) |
| Space complexity | O(J) | - |
Adversary Oracle
Adversary oracles is a family of algorithms based on the simulation of an adversary.
Adversary Oracle (straightforward)
Ref: ethereum/cbc-casper
This oracle is a simple simulation-based algorithm.
Algorithm
-
Construct the lobbying graph or get it.
-
From
view, we can see that there are validators from which the estimate of the latest messages isCAN_ESTIMATEorADV_ESTIMATEor unknown. -
If the estimate is unknown, we assume that it is
ADV_ESTIMATEin O(V^2) time.C = set() for v in V: if v in view.latest_messages and view.latest_messages[v].estimate == CAN_ESTIMATE: C.add(v) -
Build
viewableswith the following pseudocode in O(V^2) time.for v1 in V: for v2 in V: justification = view.latest_messages[v1].justification if v2 not in justification: viewables[v1][v2] = ADV_ESTIMATE elif (there is a v2 message that estimate ADV_ESTIMATE and have seen from v1): viewables[v1][v2] = ADV_ESTIMATE else: viewables[v1][v2] = (message estimate that the hash is justification[v2]) -
Assume that all validator estimates that may change from
CAN_ESTIMATEtoADV_ESTIMATEareADV_ESTIMATE.progress_mode = True while progress_mode: progress_mode = False to_remove = set() fault_tolerance = -1 for v in C: can_weight = sum(v2.weight for v2 in viewables[v] if viewables[v2] == CAN_ESTIMATE and v2 in C)) adv_weight = sum(v2.weight for v2 in viewables[v] if viewables[v2] == ADV_ESTIMATE or v2 not in C)) if can_weight <= adv_weight: to_remove.add(v) progress_mode = True else: if fault_tolerance == -1: fault_tolerance = can_weight - adv_weight fault_tolerance = ceil(min(fault_tolerance, can_weight - adv_weight) / 2) - 1 C.difference_update(to_remove) if (total weight of CAN_ESTIMATE) > (total weight of ADV_ESTIMATE): the property is finalized -
If (total weight of
CAN_ESTIMATE) > (total weight ofADV_ESTIMATE) is finally satisfied, the property is finalized. -
t = ceil(min_{v in C}{(can_weight of v) - (adv_weight of v)} / 2) - 1.
N.B. The original ethereum/casper's fault tolerance t is the minimum validator weight in C, but we think that it is min{can_weight - adv_weight}/2
Metrics
| From scratch | For a new message | |
|---|---|---|
| Time complexity | O(V^3 + VM) | O(V^3) |
| Space complexity | O(V^2) | - |
Adversary Oracle with Priority Queue (WIP)
We improve the above algorithm using a priority queue.
Metrics
| From scratch | For a new message | |
|---|---|---|
| Time complexity | O(V^2 + VM) | O(V^2) |
| Space complexity | O(V^2) | - |
Ideal Oracle
We can construct an oracle which is equivalent to the necessary and sufficient conditions of finality by simulating all the possible state transitions. If the consensus value does not change in any reachable future states, the property is considered finalized. Although this is the best about the completeness, it would be extraordinary inefficient, so we omit here about the detail.
Comparison
Complexity
Detection from scratch
| Clique Oracle | Turán Oracle | Simple Inspector | Inspector | Adversary Oracle | Adversary Oracle with Priority Queue | |
|---|---|---|---|---|---|---|
| Time | exponential | O(V^2 + VM) | O(V^2 + VM) | O(V^2J) | O(V^3 + VM) | O(V^2 + VM) |
| Space | - | O(V^2) | O(V^2) | O(J) | O(V^2) | O(V^2) |
Detection for a new message
| Clique Oracle | Turán Oracle | Simple Inspector | Inspector | Adversary Oracle | Adversary Oracle with Priority Queue | |
|---|---|---|---|---|---|---|
| Time | exponential | O(1) | O(V^2) | O(V^2J) | O(V^3) | O(V^2) |
Fault tolerance and quorum
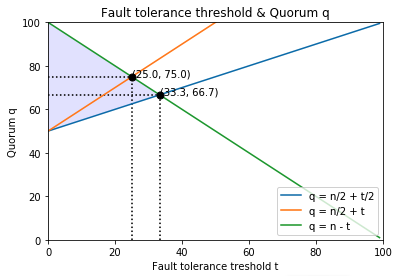
This image shows the relationship between Byzantine fault tolerance (for both safety and liveness) and the quorum of safety oracles.
The q = n - t line is the maximum number of honest validators.
For liveness, the quorum must be less than or equal to this line.
The safety oracles whose quorum condition is q > n/2 + t achieve n/4 Byzantine fault tolerance.
On the other hand, safety oracles that use q > n/2 + t/2 achieve n/3.
Example 1
| Clique Oracle | Turán Oracle | Simple Inspector | Inspector | Adversary Oracle | |
|---|---|---|---|---|---|
| t | 1 | 1 | 1 | 1 | 1 |
Example 2
| Clique Oracle | Turán Oracle | Simple Inspector | Inspector | Adversary Oracle | |
|---|---|---|---|---|---|
| t | 1 | 1 | 1 | 2 | 1 |
In this sample, the Inspector fault tolerance threshold is:
t = ceil((1-2^(-2))(2q - n)) - 1 = ceil((3/4)*(8-4)) - 1 = 2.
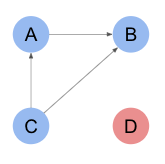
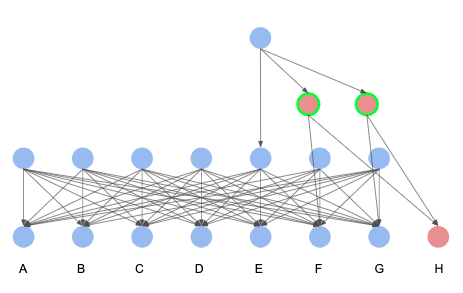
Example 3
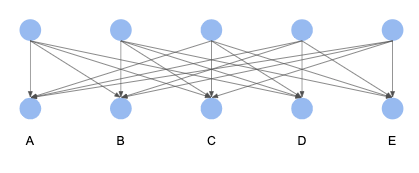
| Clique Oracle | Turán Oracle | Simple Inspector | Inspector | Adversary Oracle | |
|---|---|---|---|---|---|
| t | N/A | N/A | 1 | 1 | 1 |
In this case, the clique oracle and the Turán oracle have not yet detected finality.
{A,B,C,D,E} is the quorum set and q = 4, so fault tolerance threshold of the Simple Inspector and the Inspector t = ceil(q - n/2) - 1 = ceil(4 - 5/2) - 1 = 1.
The t of the adversary oracle is also ceil((4-1)/2) - 1 = 1.
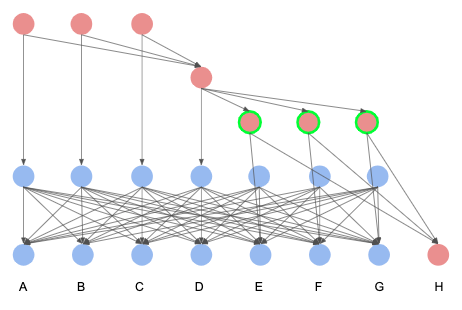
Example 4
| Clique Oracle | Turán Oracle | Simple Inspector | Inspector | Adversary Oracle | |
|---|---|---|---|---|---|
| t | 2 | N/A | 2 | 2 | 2 |
In the Turán oracle, n^2/(n^2-2|E|) = 8^2 / (8^2 - 7*6) = 64/22 = 2.9... < n/2.
Conclusion
- The Simple Inspector is better than the 2-round clique oracle and the original adversary oracle.
- The adversary oracle is equivalent to the Simple Inspector for detecting finality.
- The Inspector is just a little slow algorithm but can achieve its fault tolerance threshold of up to n/3.