Modi1987
commented
5 years ago
Modi1987
commented
5 years ago Dear Tian:
For the impedance mode issue:
From inside the class SmartServoWithImpedence.java, go to the line
if (!ServoMotion.validateForImpedanceMode(_lbr))
And change it to
if (!ServoMotion.validateForImpedanceMode(_toolAttachedToLBR))
If it works, tell me so I push the changes into the repository.
For the joyetick issue:
Probably this issue is due to the assignement of the joystick inputs. Conesqeuntly, run the following script from an inside (.m) file in Matlab,
close all;clear;clc;
instrreset;
ID=1;
joy=vrjoystick(ID);
%% Loop for reading the jpystick
while true
joyStatus=read(joy);
disp(joyStatus);
pause(0.1);
end
At the same time push the jpystick handles then show me the output
Regards
 TianXu1991
TianXu1991



 Thank you for your reply and help all the time very much!
Best regards,
Tian Xu.
Thank you for your reply and help all the time very much!
Best regards,
Tian Xu.
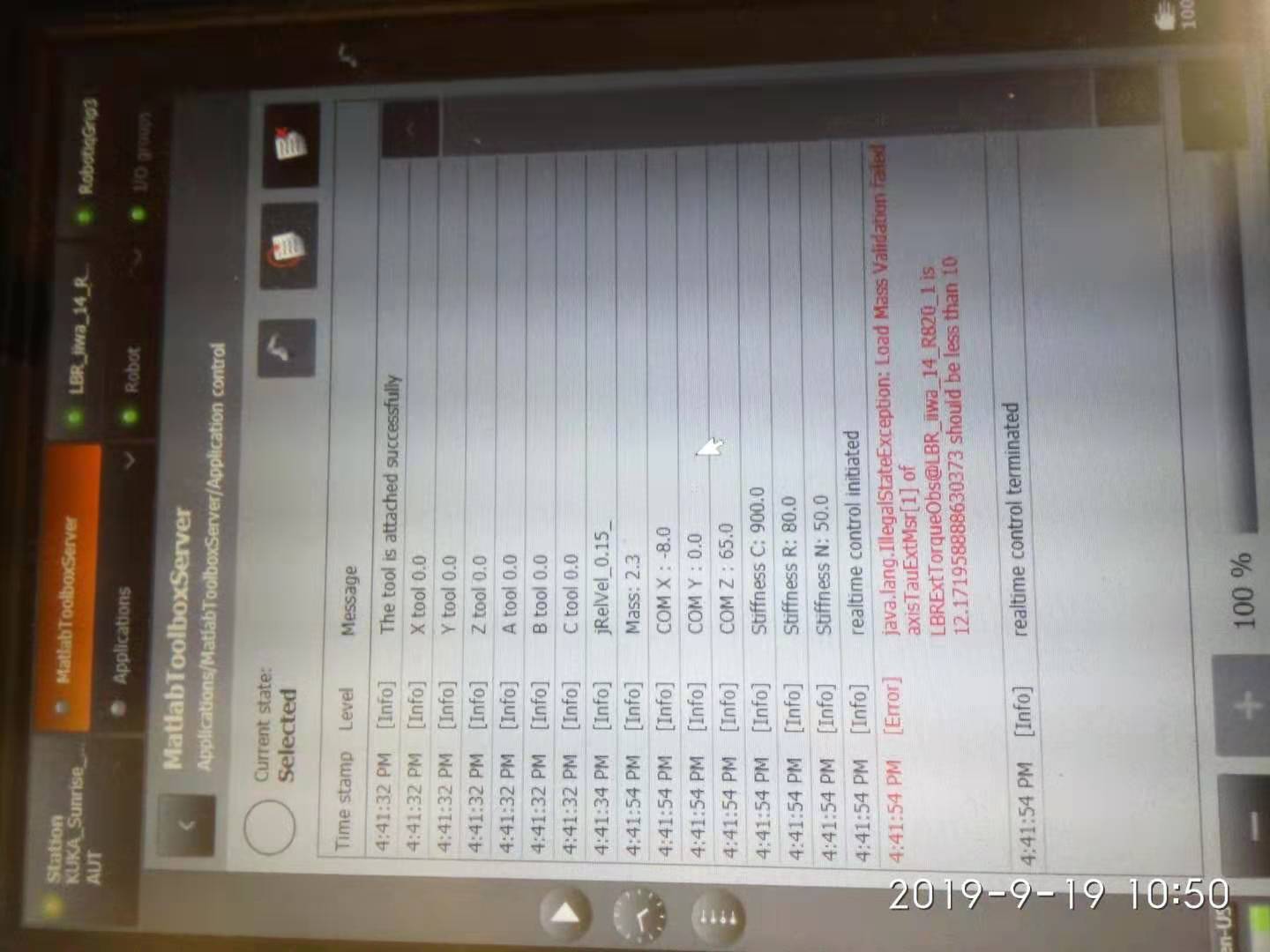
Hi, Dr. Safeea, I’m Tian. After dealing with the previous problems, we run the demos in the KST, which are really wonderful! However, not every demo can be run successfully, such as the ‘KSTclass_Tutorial_realTimeImpedencePlotTorqueFeedBack.m’. Our tool mass is 2.3 kg, the COM is [-8,0,65] mm. The parameters are found in our gripper manual. Firstly, we use these parameters, but some errors appear in the SmartPad and the matlab, which said 'java.lang.IllegalStateException:Load Mass Validation Failed axisTauExtMsr[1] of LBRExtTorque@LBR_iiwa_14_R820_1 is 12.171958888630373 should be less than 10'. The errors are shown below. I have also tried to modify and use different tool parameters in the matlab code, but it does not work. Besides, I also search the solution in Google and Github, but I find no solution to this. In addition, about the KST gamepad demos, we can run them successfully, and we can use the left handle of gamepad to select different axis of iiwa, but we cannot move the joints by using the right handle of gamepad. We really don’t know why. We will appreciate your help very much if you can help us analyze these problems! Especially the impedence control demo! I’m really sorry to disturb you so much and looking forward to your reply. Best regards, Tian Xu.