edo_gazebo
Comau e.DO Gazebo Simulation
To start the simulation use the following commands:
Only the robot:
roslaunch edo_gazebo edo.launch
roslaunch edo_moveit edo_moveit_planning_execution.launch __ns:=edo sim:=true
roslaunch edo_moveit moveit_rviz.launch __ns:=edo config:=trueRobot with Gripper:
roslaunch edo_gazebo edo_gripper.launch
roslaunch edo_gripper_moveit edo_moveit_planning_execution.launch __ns:=edo sim:=true
roslaunch edo_gripper_moveit moveit_rviz.launch __ns:=edo config:=trueYou may need to use the eDO_description repository from my fork.
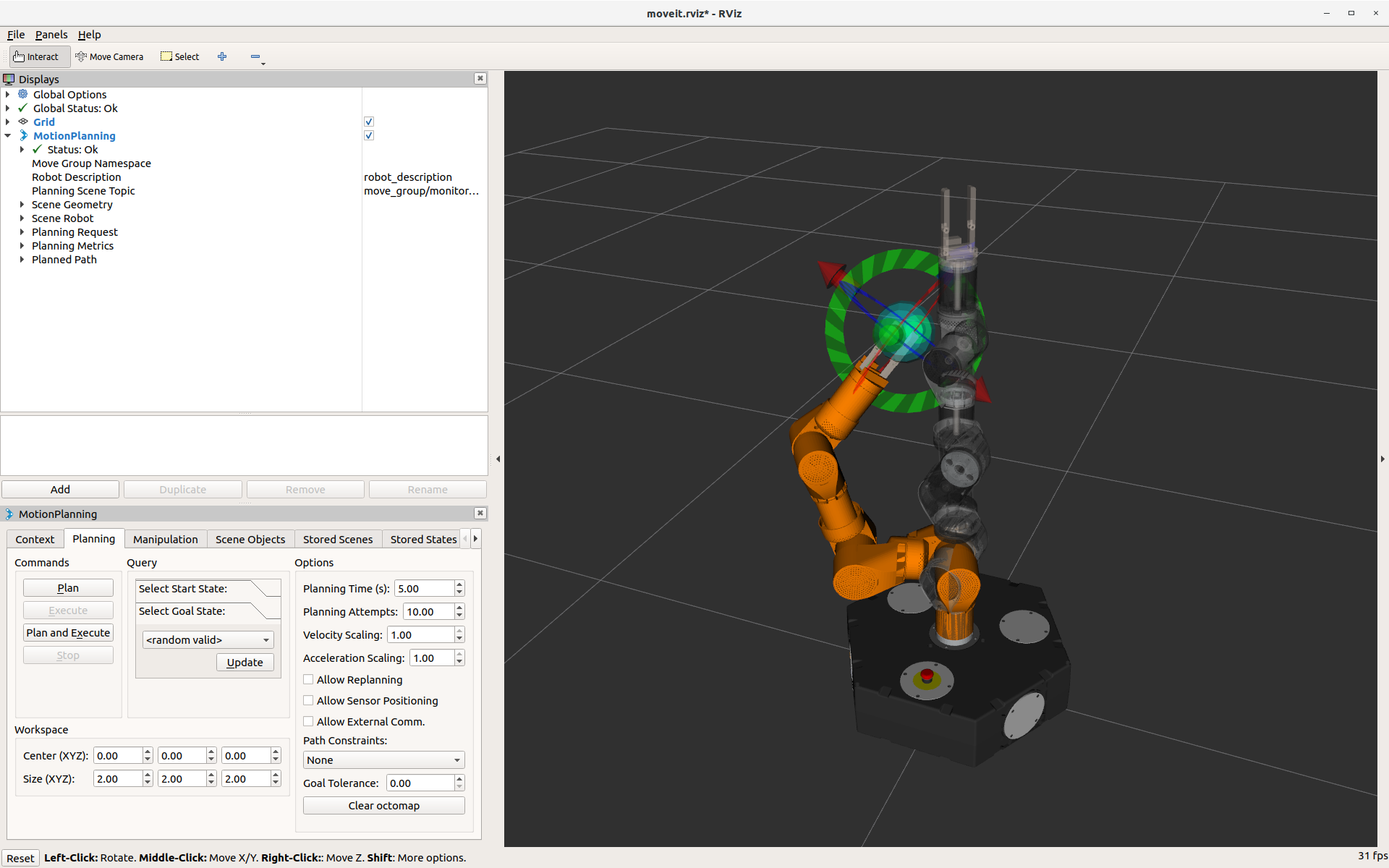
You will see RViz showing the e.Do:
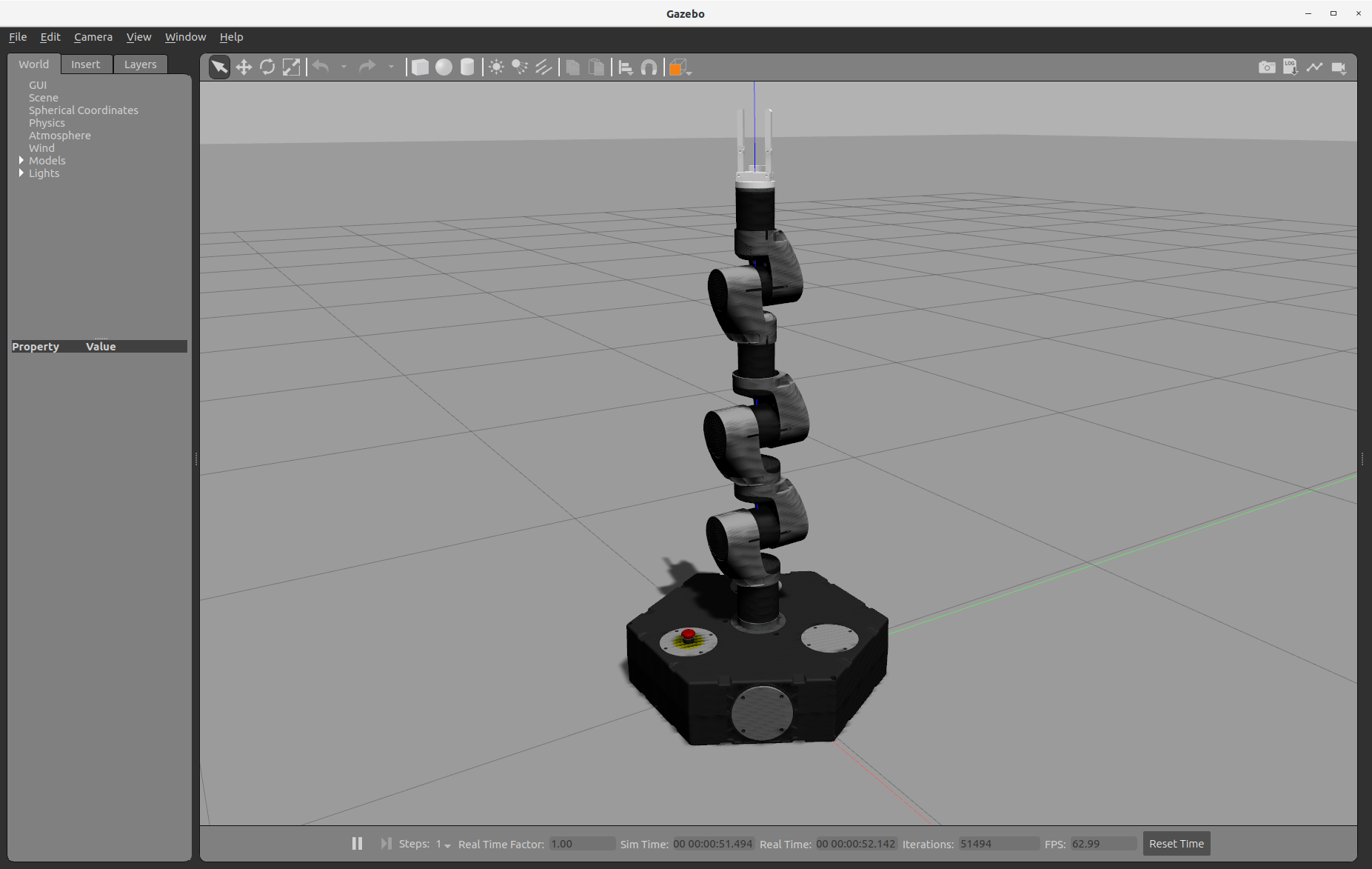
And Gazebo will look like this: