LOCK
Localization, Obstacle avoidance , Control and Kinematics framework for differential steering systems.
Introduction
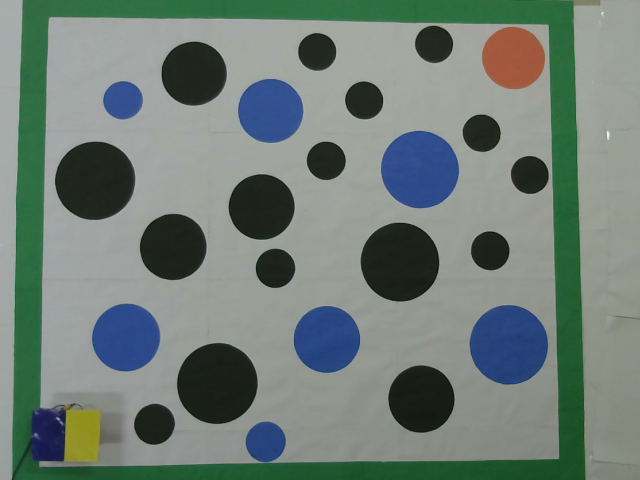
- The Problem Statement assumes a static camera mounted with the complete view of the arena.
- The obstacles are assumed to be of a paticular predefined color.
- Uses A* for Path Planning with Erosion/Dilation to provide the bot with sufficient cleareance from obstacles.
- Controls written specifically for differential steering systems.
Some Sample Tracks the bot successfully completed:
Sample Tracks at NIT Pragyan:

Sample Track at Kurukshetra:
Disclaimer: This is code developed specifically for competition and are certain to contain idiosyncrasies but it won in all the competitions it participated (2015-2016) :)
Competition Runs 1

Competition Run 2
Demo Run at Lab

Tools needed
- USB HD webcam
- opencv 2.4.x
- Arduino UNO/MSP430
- HC06/Serial