 ROBOTIS-Will
commented
2 years ago
ROBOTIS-Will
commented
2 years ago Hi @ahmetmustafakos
Some latest version of Processing may not compatible to the instructions. Please try using the Processing v3.5.4.
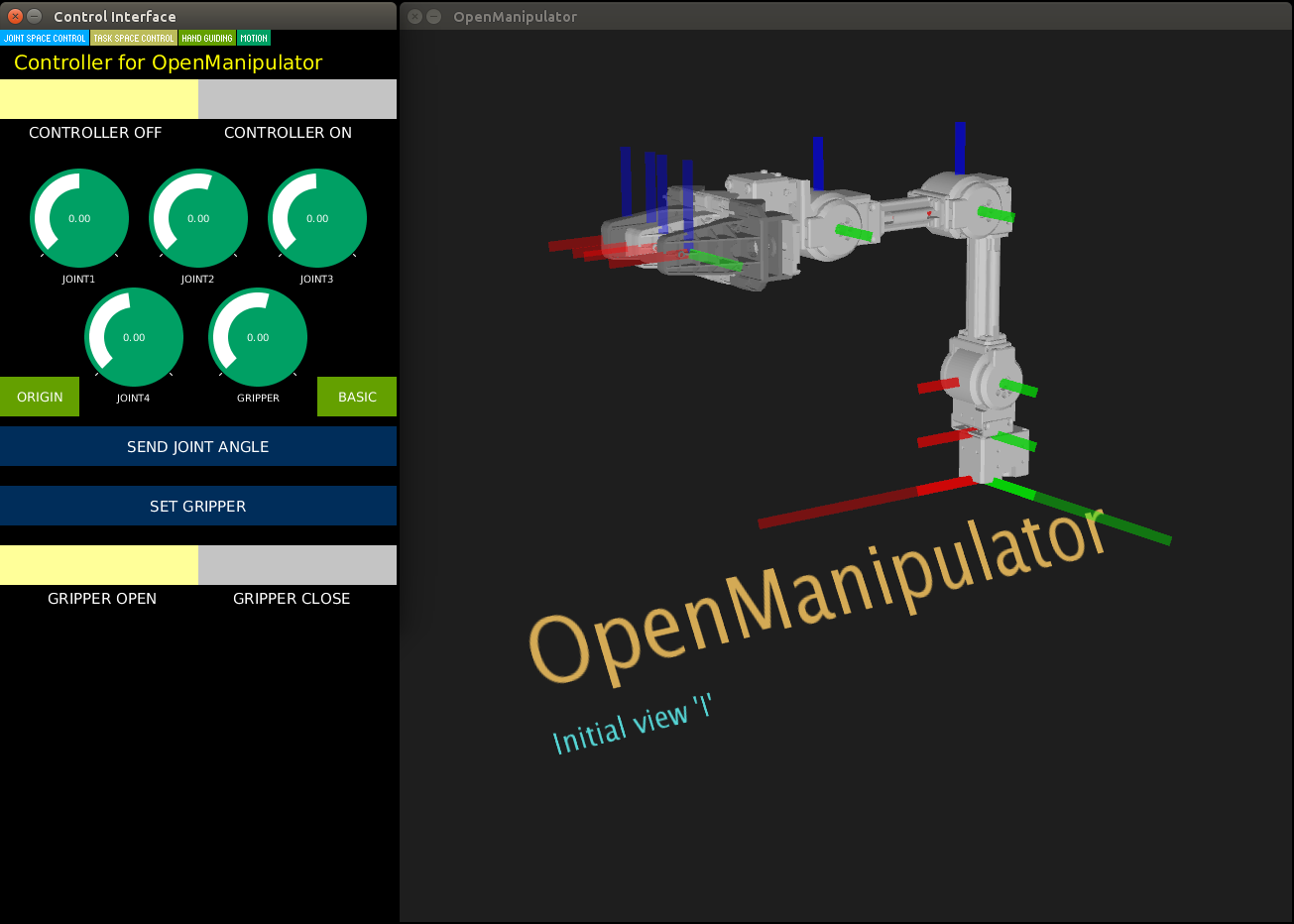
Also, make sure to press the reset button of the OpenCR before running the processing as written in the eManual below. https://emanual.robotis.com/docs/en/platform/openmanipulator_x/quick_start_guide_basic_operation/#launch-controller
When the Processing is up and running, you should click on the CONTROLLER ON button first then manipulate the arm with the GUI.
 ahmetmustafakos
ahmetmustafakos
I am following this tutorial : https://emanual.robotis.com/docs/en/platform/openmanipulator_x/quick_start_guide/ My motors communicates with RS485 as oppose to TLL. When I upload the OpenCR with arduino IDE using example code "open_manipulator_chain" and then when I try to control manipulator with Processing I get an error saying; "Please, set on controller [0] "COM5" [1] "COM6" [2] "COM7"
My openCR is connetted to COM7 I set this setting like this: " connectOpenCR(2); "
What should I do to control this manipulator?