## Object Avoidance in drones using any type of sensor.
Introduction Currently Ardupilot supports only a certain types of sensors to be used for object avoidance. This project hopes to achieve the same using any type of sensor.
⚠️ The Scripts in this project are highly experimental and can lead to crash of your drone so use these with caution.
Requirements
-
A Pixhwak, APM or any Ardupilot compitable flight controller.
-
A Raspberry Pi configured as a companion computer For more info on how to configure Raspberry Pi as a companion computer go to this link http://ardupilot.org/dev/docs/raspberry-pi-via-mavlink.html
-
Basic knowledge of python.
Usage
-
Copy the object_avoidance_test.py file to the Raspberry Pi.
-
Change the ECHO and TRIG pin if required.
-
Check if the serial port is correct.
-
Open Full Parameter List in mission planner and change PRX_TYPE to 2
Testing
To check if everything works, connect the flight controller to mission planner.
Press Ctrl+F and select proximity
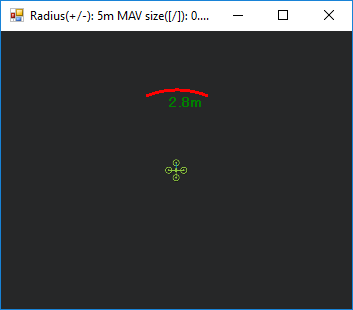 If obstacles are detected than everything is working fine.
If obstacles are detected than everything is working fine.
Working
This script converts the distance measured by any sensor and converts it into a distance_sensor mavlink message and sends it to the FC via the telemetry port. For more info http://ardupilot.org/dev/docs/code-overview-object-avoidance.html The function sensor_data(d,o) encodes distance and orientation as mavlink message and sends them to the fc. The argument distance takes values in cm and orientation takes value as following: 0:Forward 1:Forward-Right 2:Right 3:Back-Right 4:Back 5:Back-Left 6:Left 7:Forward-Left 24:Up 25:Down For addition of more sensors, the distance can be collected and sent via the sensor_data function with the correct orientation.