VHACD
![]()
We're currently working on lots of things! Please take a short moment fill out our survey to help us identify what products and packages to build next.
The V-HACD library decomposes a 3D surface into a set of "near" convex parts.

Installation
-
Using Unity 2020.2 or later, open the Package Manager from
Window->Package Manager. -
In the Package Manager window, find and click the + button in the upper lefthand corner of the window. Select
Add package from git URL....
-
Enter the git URL for the desired package. Note: you can append a version tag to the end of the git url, like
#v0.4.0or#v0.5.0, to declare a specific package version, or exclude the tag to get the latest from the package'smainbranch.https://github.com/Unity-Technologies/VHACD.git?path=/com.unity.robotics.vhacd -
Click
Add.
To install from a local clone of the repository, see installing a local package in the Unity manual.
Why do we need approximate convex decomposition?
Collision detection is essential for realistic physical interactions in video games and computer animation. In order to ensure real-time interactivity with the player/user, video game and 3D modeling software developers usually approximate the 3D models composing the scene (e.g. animated characters, static objects...) by a set of simple convex shapes such as ellipsoids, capsules or convex-hulls. In practice, these simple shapes provide poor approximations for concave surfaces and generate false collision detection.
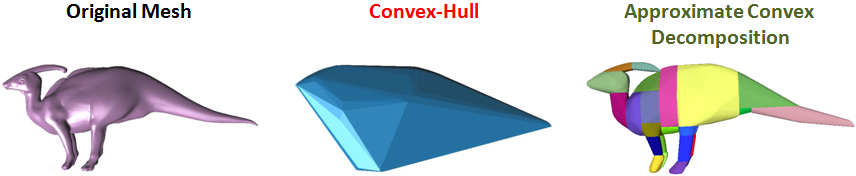
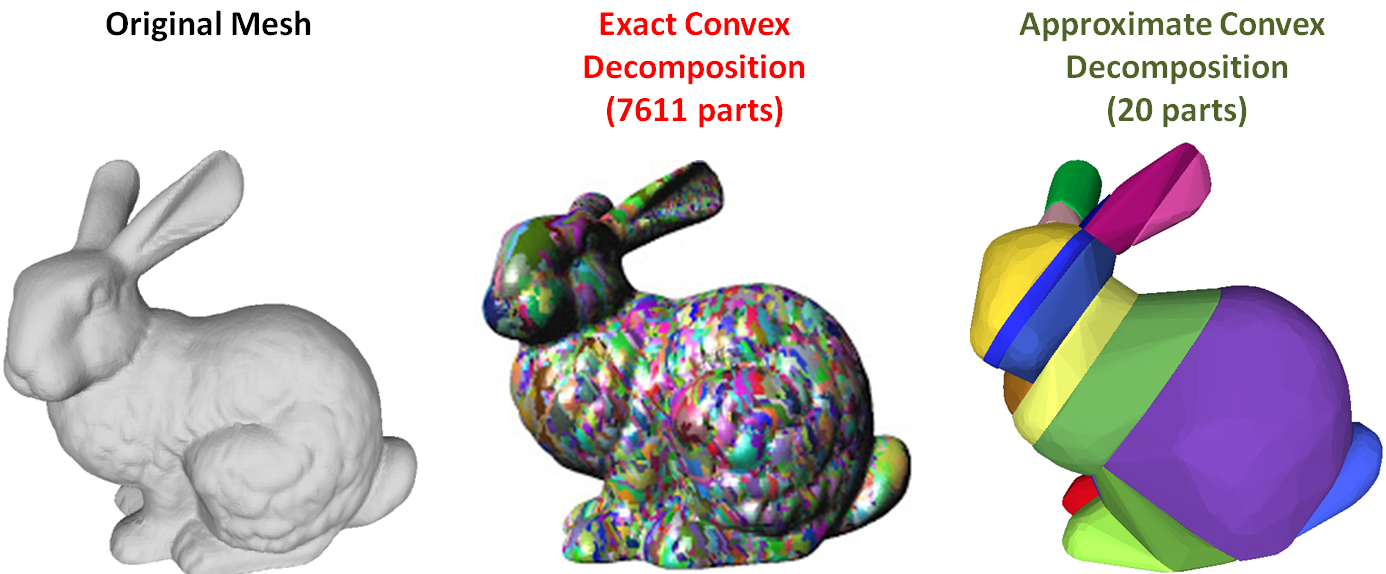
A second approach consists in computing an exact convex decomposition of a surface S, which consists in partitioning it into a minimal set of convex sub-surfaces. Exact convex decomposition algorithms are NP-hard and non-practical since they produce a high number of clusters. To overcome these limitations, the exact convexity constraint is relaxed and an approximate convex decomposition of S is instead computed. Here, the goal is to determine a partition of the mesh triangles with a minimal number of clusters, while ensuring that each cluster has a concavity lower than a user defined threshold.
Parameters
| Parameter name | Description | Default value | Range |
|---|---|---|---|
| resolution | maximum number of voxels generated during the voxelization stage | 100,000 | 10,000-64,000,000 |
| depth | maximum number of clipping stages. During each split stage, all the model parts (with a concavity higher than the user defined threshold) are clipped according the "best" clipping plane | 20 | 1-32 |
| concavity | maximum concavity | 0.0025 | 0.0-1.0 |
| planeDownsampling | controls the granularity of the search for the "best" clipping plane | 4 | 1-16 |
| convexhullDownsampling | controls the precision of the convex-hull generation process during the clipping plane selection stage | 4 | 1-16 |
| alpha | controls the bias toward clipping along symmetry planes | 0.05 | 0.0-1.0 |
| beta | controls the bias toward clipping along revolution axes | 0.05 | 0.0-1.0 |
| gamma | maximum allowed concavity during the merge stage | 0.00125 | 0.0-1.0 |
| pca | enable/disable normalizing the mesh before applying the convex decomposition | 0 | 0-1 |
| mode | 0: voxel-based approximate convex decomposition, 1: tetrahedron-based approximate convex decomposition | 0 | 0-1 |
| maxNumVerticesPerCH | controls the maximum number of triangles per convex-hull | 64 | 4-1024 |
| minVolumePerCH | controls the adaptive sampling of the generated convex-hulls | 0.0001 | 0.0-0.01 |
Support
For questions or discussions about Unity Robotics package installations or how to best set up and integrate your robotics projects, please create a new thread on the Unity Robotics forum and make sure to include as much detail as possible.
For feature requests, bugs, or other issues, please file a GitHub issue using the provided templates and the Robotics team will investigate as soon as possible.
More from Unity Robotics
Visit the Robotics Hub for more tutorials, tools, and information on robotics simulation in Unity!