Transferable Tactile Transfomers (T3) and the Foundation Tactile (FoTa) dataset
Jialiang (Alan) Zhao, Yuxiang Ma, Lirui Wang, and Edward H. Adelson
MIT CSAIL
Overview
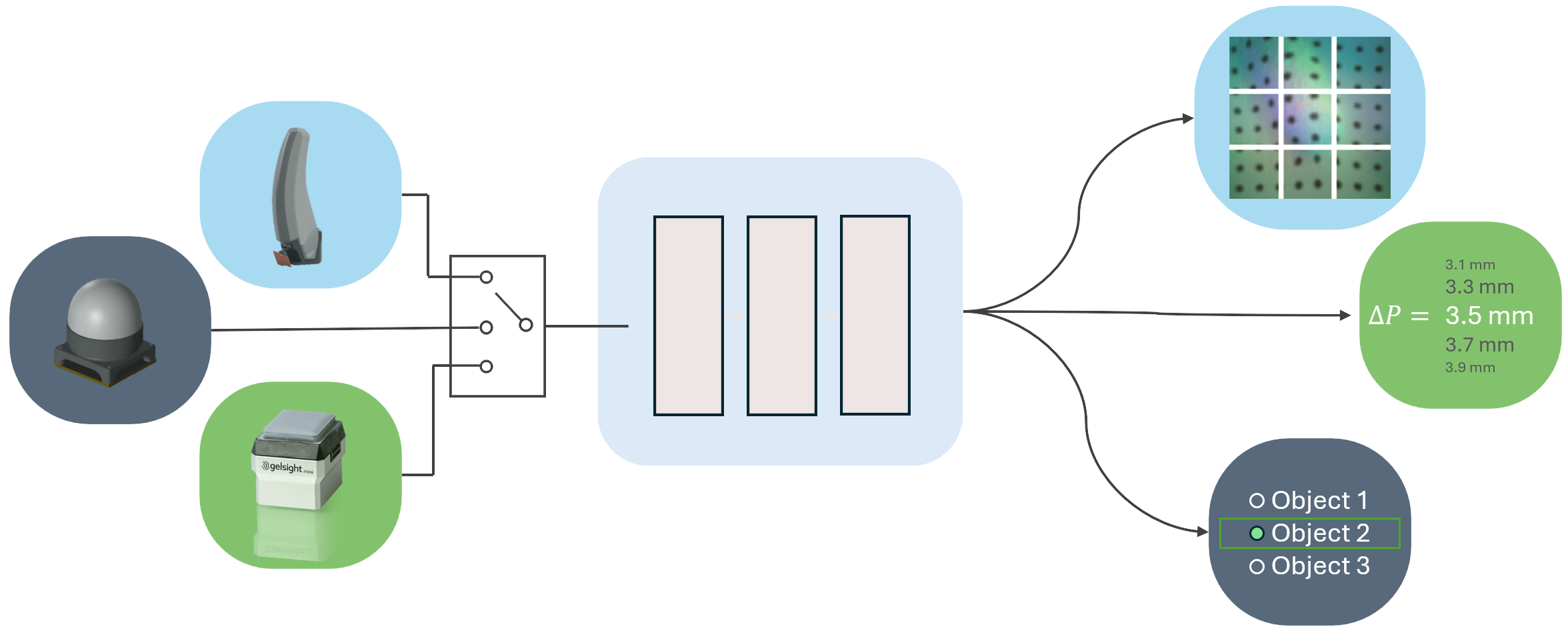
We present T3, a heterogeneous tactile representation learning framework based on transformers, and FoTa, a large tactile dataset that contains over 3 million tactile images collected from 13 sensors and 11 tasks. T3 extracts the common representation that is sharable between different camera-based tactile sensors and downstream tasks.
Installation
git clone https://github.com/alanzjl/t3
cd t3
pip install -e .Get started
The best way to get started with using T3 or FoTa is to checkout our for step-and-step instructions on how to manipulate data and run T3.
More details about file structure of FoTa can be found on
.
Citation
@article{zhao2024transferable,
title={Transferable Tactile Transformers for Representation Learning Across Diverse Sensors and Tasks},
author={Jialiang Zhao and Yuxiang Ma and Lirui Wang and Edward H. Adelson},
year={2024},
eprint={2406.13640},
archivePrefix={arXiv},
}MIT License.