proj311-基于飞腾派的Arceos移植与外设驱动开发-设计文档&开发总结
- 队名:旋转轮椅
- 成员:姚宏伟,郭天宇,蒋秋吉
- 指导老师:李明
- 学校:上海建桥学院
[TOC]
如何运行复现?这里是使用手册
使用手册遵循Arceos开发的惯例,其位于doc目录下,其中:
项目概述
飞腾派开发板是飞腾公司针对教育行业推出的一款国产开源硬件平台,兼容 ARMv8-A 处理器架构。飞腾小车是一款利用飞腾派开发板组装的小车,它是一个计算机编程实验平台,包含电机驱动、红外传感器、超声传感器、AI加速棒、视觉摄像云台等,可以满足学生学习计算机编程、人工智能训练等课题。
ArceOS是基于组件化设计的思路,用Rust语言的丰富语言特征,设计实现不同功能的独立操作系统内核模块和操作系统框架,可形成不同特征/形态/架构的操作系统内核。

本项目需要参赛队伍将ArceOS移植到飞腾派开发板,实现UART串口通信,并且实现I2C驱动与USB驱动,并使用上述任务的成果驱动飞腾小车运行。
- 完成ArceOS操作系统移植到飞腾派开发板。
- 实现UART串口通信。
- 实现I2C驱动,并驱动小车前进
- 实现USB主机端驱动,并接受外部输入以控制小车
我们代码的主要位置:
- crate:
- driver_usb: 该crate包含了usb系统的代码
- ax_event_bus: 该crate包含了我们给arceos新增的事件系统
- driver_i2c: 该crate包含了我们所编写的i2c驱动
- driver_pca9685: 该crate基于i2c编写了pca9685驱动板的驱动,用于控制小车
- driver_pci: 该crate包含了我们编写的pcie驱动-虽然我们写出来后才发现用不上,pcie在uboot中就已经配置完成了
- modules:
- apps:
- boards/phytium_car: 包含了最终在飞腾小车上的demo
- usb-hid: 包含了对于usb-hid设备的demo
- 其他文件:
完成概况
-
系统移植:完成
-
UART串口通信:完成
-
i2c驱动:已完成
-
USB驱动:已完成,因协议较为复杂,分为以下几个部分说明
- XHCI主机驱动:完成
- 通用性usb主机端驱动框架重构:完成
- USB-HID:完成,已有鼠标测试用例
- 简易的系统事件总线:完成
- XHCI主机驱动:完成
-
驱动小车:完成
- 运行视频:
- 通过百度网盘分享的文件:os大赛-演示视频.mp4 链接:https://pan.baidu.com/s/1YJJXRRfNgbRHjzvM96bi-Q?pwd=3n0f 提取码:3n0f
在一切开始前,前人所作的工作&开发进展情况说明
本仓库基于该分支进行开发
- 飞腾派所使用的UART控制器为PL011,是一款被广泛应用的适用于Arm平台的芯片,因此,该芯片的驱动有较多实例可供参考。
- i2c驱动:无,逆向官方的sdk,从0开始开发。
- USB驱动:本任务中所指的USB驱动,是指USB在主机端的一整套子系统,就从软件层面来说,其包含XHCI(USB3.0主机控制器)驱动与USB协议层驱动
- XHCI驱动:分为两部分,首先是主机本身的控制程序,然后是基于XHCI的USB设备枚举程序
- 主机控制程序: 参见XHCI规范第四章(Operation Model),这部分主要负责主机寄存器的相关操作,与硬件关联的数据结构的管理(如控制器在内存中的抽象,控制器所使用的内存的管理(TRB环,中断向量等))
- 设备枚举程序: 在主机控制程序完成后,我们还需要根据USB规范,对所连接的设备进行一次扫描,扫描过程中需要对设备做对应的初始化(这部分是通用操作,包含启用USB端点,选择设备配置等)
- USB协议层:USB规范是类似于OSI网络七层架构一样的设计,换句话来说,USB规范并不是单本规范,而是一套规范,在USB所定义的四种传输类型(传输层)的基础上,则是随着USB设备类型的日益增加而变的无比庞大的协议层,举几个例子:
- HID(Human Interface Device)协议指的是人类交互设备,如:鼠标,键盘,手柄等设备。
- UVC(USB video Class)协议是是微软与另外几家设备厂商联合推出的为USB视频捕获设备定义的协议标准
- ...
- 在更之上,还有诸多厂家自定义的协议,因此,在我们从0开始,创新性的使用RUST编写操作系统的情况下,想在这么短的时间内,凭借不多的人手去移植整个USB系统是几乎不可能的,因此我们选择,从协议层开始,先仅仅移植出一套可以形成控制闭环的最小系统,并且在编写的过程中做好整个USB子系统的设计,以方便日后的来者进行开发
- 从另一方面来说,用Rust所编写的完整的USB主机驱动也很少,因此可以拿来参考的案例也比较少,Redox算是一个,但是其usb系统和核心部分分别位于用户态和内核态,参考意义不大
我们工作的创新点和主要工作量
在OS移植这个任务上:
- 为什么创新?
- 我们也参与了Arceos的开发
- Arceos有着新颖的模块化设计,可以按需编译所需模块形成最小系统。同时也为系统移植带来了便利
- Arceos是使用rust编写的,是这门新兴语言在系统内核开发上的实践。
- Arceos顺利的移植到了飞腾派上,充分的说明了他的发展潜力与潜在的工业用途
- 工作量有多大?
- 我们查阅飞腾官方的手册与其提供的sdk代码,并逐步的核对了内存空间的分布与程序的入口,最终完成了系统的移植。
- 移植工作包括但不止于:肉眼读汇编代码进行模拟,在无仿真器/gdb的情况下对代码插桩输出进行定位错误点。
- 以上任务都是在串口输出没有移植完毕的情况下同步进行的,我们同时移植好了串口驱动和操作系统,换句话来说,我们在没有完整的串口输出的情况下移植系统
- 综上所述,我们在飞腾派+Arceos上的工作兼有工作量与创新点。同时,在经过进一步完善修整后Arceos会并入飞腾社区的官方支持系统列表,为开源社区建设贡献力量。
在USB驱动上:
- 为什么创新?
- 从来都没有过一个跨平台/跨操作系统的usb主机端库,而我们做出来了
- rust生态的usb库都是基于c的libusb的封装,除了以上缺点外,也有内存不安全的因素,而我们用纯rust实现了usb库及其相关生态(同样的,也是此前从未有过的:USB设备描述符拓扑结构解析,可独立运行的驱动子系统等)
- 我们的USB系统设计与以往的设计是完全不同的,结构更清晰明了,而且能够支持多种工作模式。
- 这套系统同时还有极高的可扩展性和弹性-他还可以动态的加载USB子系统的设备驱动模块,同时为调试用的代码注入(钩子系统)也预留了很多可以注入/二次开发的位置
- 工作量有多大?
- 仅仅从浅显直白的代码行数的角度讲:有数个代码文件单文件达到了1000行以上,且都是原创代码
- 我们全部的代码都重构了四-五次,历史版本可以从git记录中找到
- xhci文档有645页,其中:
- 描述了寄存器结构的章节占70+页
- 描述了相关的软件数据结构的章节占80+页
- 描述了xhci控制器工作模型的章节占290+页
- 我们完整的读完了不止以上这些,并且根据所学到的从0开始实现了xhci控制器的驱动
- usb相关规范与资料更是数不胜数,我们也是根据这些资料进行实现的USB主机端系统,由于rust编程的模型与其他编程模型的不同,我们完全无法直接照搬c/c++的逻辑,至少也要依照内存安全的要求进行重构
- 我们所提出的USB驱动模型正是我们从以上的学习与实践总结出来实现
- 综上所述,我们在USB系统上的工作兼有工作量与创新点。同时,这套USB系统在经过进一步完善后将会参加rCore社区今年的开源毕设,为开源社区建设贡献力量。
在I2C移植上:
- 为什么创新?
- I2C由于其特点,rust社区至今同样也没有一套完整且通用的I2C驱动
- 造成其上问题的原因是I2C更贴近硬件,不同的板子上会有不同的实现,我们在飞腾派上成功的使用rust编写出了I2C驱动
- 工作量有多大?
- 我们根据官方提供的c语言版sdk,编写出了I2C驱动。 2.正如前文所说,飞腾派的I2C支持smbus子协议,并且同时有两个i2c端口:一个处于Mater模式,一个处于Slave模式,同样的,代码也要各自实现一次
- 综上所述,我们在I2C系统上的工作兼有工作量与创新点,同时,这套I2C系统将会在经过进一步完善后进入Arceos及其衍生系统族的生态,为开源社区贡献力量。
工作日志
初赛
第一阶段-系统移植&串口移植-2024.3-2024.4
| 时间节点 | 里程碑 |
|---|---|
| 2024/3/27 | 收到设备,初步配置开发环境 |
| 2024/3/29 | dump出了内存布局,新建并修改了arceos的平台描述文档使其适配平台的内存结构 |
| 2024/3/30 | 开始串口调试,进入Uboot,确认路线:通过uboot(tftp加载)引导arceos镜像,并实验成功 |
| 2024/4/3 | 系统移植成功,能够通过板子上的gpio进行串口通信,可以与系统的命令行交互 |
第二阶段-USB系统移植-跑通前
| 时间节点 | 里程碑-USB系统 | 里程碑-i2c驱动 |
|---|---|---|
| 2024/4/7 | 收到飞腾小车,开始研究小车的结构,同时开始抽时间研究i2c驱动 | |
| 2024/4/9 | 开始编写usb系统的驱动 | |
| 2024/5/1 | Xhci控制器初始化完成 | |
| 2024/5/15 | 成功通过控制器给设备分配了地址(即-第一条xhci控制命令的成功发送) | |
| 2024/5/17 | 编译出了官方sdk中的demo | |
| 2024/6/15 | 开启了设备的控制端点,能够进行控制传输,并编写了初赛所需要的文档 |
决赛-一阶段
第二阶段-USB系统移植-跑通Hid设备驱动
| 时间节点 | 里程碑-USB系统 | 里程碑-i2c驱动 |
|---|---|---|
| 2024/6/20 | 获取到了设备的描述符,并简单编写了相应的描述符解析代码 | |
| 2024/7/10 | 成功根据设备的端点配置好了设备的其余通信断电,决定先写个hid驱动 | |
| 2024/7/15 | 鼠标驱动demo大体完成,能够获取单次回报数据,开始检修bug | 开始根据sdk编写i2c驱动 |
| 2024/7/18 | 经排查,定位到bug问题出现在传输环的翻转位上,经过修复后可以正常建立有线鼠标的通信 | |
| 2024/7/20 | 成功编写出无线鼠标的驱动(即-实现了复合hid设备) |
第三阶段-提供跨平台/跨操作系统移植友好性的usb驱动框架-重构
| 时间节点 | 里程碑-USB系统 | 里程碑-i2c驱动 |
|---|---|---|
| 2024/7/22 | 经研究与实际需求相结合,决定开始编写uvc摄像头驱动 | |
| 2024/7/23 | 已经到了不得不重构的时候了,开始重构整个usb框架 | |
| 2024/7/29 | 完成了框架的重构,将原有的hid驱动搬到了新的框架下,原有代码位于[phytium_pi_dev](Files · phytium_pi_dev · 旋转轮椅 / proj2210132-基于飞腾派的Arceos移植与外设驱动开发 · GitLab (eduxiji.net))分支 | 代码编写完成,开始debug |
| 2024/7/31 | 完成了代码文档的编写 | 完成了i2c代码的编写 |
决赛-线下答辩之前,一阶段之后
| 时间节点 | 里程碑 |
|---|---|
| 2024/8/5 | 完善了USB驱动框架的细节,现在可以解析更复杂的设备了 |
| 2024/8/10 | i2c现在可以驱动小车移动了 |
| 2024/8/12 | 编写了Arceos与USB模块各自的事件系统,并成功的将所有的工作连接在了一起——使用usb设备控制小车移动 |
我们工作的详细内容
系统移植
由于Arceos从设计开始就以跨平台为目标,因此已经有了较为完善的启动配置文件:
#./platforms/aarch64-phytium-pi.toml
# Architecture identifier.
arch = "aarch64"
# Platform identifier.
platform = "aarch64-phytium-pi"
# Platform family.
family = "aarch64-phytium-pi"
# Base address of the whole physical memory.
phys-memory-base = "0x8000_0000"
# Size of the whole physical memory.
phys-memory-size = "0x8000_0000" # 2G
# Base physical address of the kernel image.
kernel-base-paddr = "0x9010_0000"
# Base virtual address of the kernel image.
kernel-base-vaddr = "0xffff_0000_9010_0000"
# kernel-base-vaddr = "0x9010_0000"
# Linear mapping offset, for quick conversions between physical and virtual
# addresses.
phys-virt-offset = "0xffff_0000_0000_0000"
#phys-virt-offset = "0x0000_0000_0000_0000"
# MMIO regions with format (`base_paddr`, `size`).
mmio-regions = [
# ["0xFE00_B000", "0x1000"], # mailbox
# ["0xFE20_1000", "0x1000"], # PL011 UART
# ["0xFF84_1000", "0x8000"], # GICv2
#["0x40000000", "0xfff_ffff"], # pcie ecam
# ["0x6_0000_0000", "0x4000_0000"] # pcie control
["0x2800_C000", "0x1000"], # UART 0
["0x2800_D000", "0x1000"], # UART 1
["0x2800_E000", "0x1000"], # UART 2
["0x2800_F000", "0x1000"], # UART 3
# ["0x32a0_0000", "0x2_0000"], # usb0
# ["0x32a2_0000", "0x2_0000"], # usb0
# ["0x3200_C000", "0x2000"], #Ethernet1
# ["0x3200_E000", "0x2000"], #Ethernet2
# ["0x3080_0000", "0x8000"], # GICv2
["0x3000_0000","0x800_0000"], #other devices
["0x4000_0000","0x4000_0000"], # pcie
["0x10_0000_0000", "0x20_0000_0000"], # pcie mmio 64
# ["0x6_0000_0000", "0x6_3fff_ffff"] # pcie control
]
virtio-mmio-regions = []
# UART Address
uart-paddr = "0x2800_D000"
uart-irq = "24"
# GIC Address
gicc-paddr = "0xFF84_2000"
gicd-paddr = "0xFF84_1000"
# Base physical address of the PCIe ECAM space.
pci-ecam-base = "0x4000_0000"
# End PCI bus number.
pci-bus-end = "0x100"
# PCI device memory ranges.
pci-ranges = [
["0x58000000", "0x27ffffff"], # pcie mmio 32
["0x10_0000_0000", "0x30_0000_0000"], # pcie mmio 64
# ["0x5800_0000", "0x7fff_ffff"],
# ["0x6_0000_0000", "0x6_3fff_ffff"]
]
# Size of the nocache memory region
nocache-memory-size = "0x70_0000"此外还需要修改一些Makefile
#Makefile
#...
ifeq ($(PLATFORM_NAME), aarch64-raspi4)
include scripts/make/raspi4.mk
else ifeq ($(PLATFORM_NAME), aarch64-phytium-pi)
include scripts/make/phytium-pi.mk #添加编译平台目标
else ifeq ($(PLATFORM_NAME), aarch64-bsta1000b)
include scripts/make/bsta1000b-fada.mk
endif
#...为了开发时的方便起见,我们还写了给自动上传编译结果至uboot以供引导的小脚本
#scripts/make/phytium-pi.mk
#添加启动项
phytium: build #build出目标镜像并打包成uboot可用格式
gzip -9 -cvf $(OUT_BIN) > arceos-phytium-pi.bin.gz
mkimage -f tools/phytium-pi/phytium-pi.its arceos-phytiym-pi.itb
@echo 'Built the FIT-uImage arceos-phytium-pi.itb'
chainboot: build #无需手动载入镜像,使用此启动项可以将编译结果自动加载进uboot
tools/phytium-pi/yet_another_uboot_transfer.py /dev/ttyUSB0 115200 $(OUT_BIN)
echo ' ' > minicom_output.log
minicom -D /dev/ttyUSB0 -b 115200 -C minicom_output.log#tools/phytium-pi/yet_another_uboot_transfer.py
#!/usr/bin/env python3
#串口传输脚本
import sys
import time
import serial
from xmodem import XMODEM
def send_file(port, baudrate, file_path):
# 打开串口
ser = serial.Serial(port, baudrate, timeout=1)
# 等待 U-Boot 提示符
while True:
line = ser.readline().decode('utf-8', errors='ignore').strip()
print(line)
if line.endswith('Phytium-Pi#'):
break
# 发送 loady 命令
ser.write(b'loadx 0x90100000\n')
time.sleep(0.5)
# 等待 U-Boot 准备好接收文件
while True:
line = ser.readline().decode('utf-8', errors='ignore').strip()
print(line)
if 'Ready for binary' in line:
break
# 发送 'C' 字符开始传输
ser.write(b'C')
# 使用 xmodem 协议传输文件
with open(file_path, 'rb') as f:
def getc(size, timeout=1):
return ser.read(size) or None
def putc(data, timeout=1):
return ser.write(data)
modem = XMODEM(getc, putc)
modem.send(f)
# 关闭串口
ser.close()
if __name__ == '__main__':
if len(sys.argv) != 4:
print("Usage: python script.py <port> <baudrate> <file_path>")
sys.exit(1)
port = sys.argv[1]
baudrate = int(sys.argv[2])
file_path = sys.argv[3]
send_file(port, baudrate, file_path)串口适配
代码详见该crate文件夹,其启动步骤大致为:
根据手册定义需要的寄存器(默认波特率是115200,无需定义处理波特率相关寄存器)
register_structs! {
/// Pl011 registers.
Pl011UartRegs {
/// Data Register.
(0x00 => dr: ReadWrite<u32>),
(0x04 => _reserved0),
/// Flag Register.
(0x18 => fr: ReadOnly<u32>),
(0x1c => _reserved1),
/// Control register.
(0x30 => cr: ReadWrite<u32>),
/// Interrupt FIFO Level Select Register.
(0x34 => ifls: ReadWrite<u32>),
/// Interrupt Mask Set Clear Register.
(0x38 => imsc: ReadWrite<u32>),
/// Raw Interrupt Status Register.
(0x3c => ris: ReadOnly<u32>),
/// Masked Interrupt Status Register.
(0x40 => mis: ReadOnly<u32>),
/// Interrupt Clear Register.
(0x44 => icr: WriteOnly<u32>),
(0x48 => @END),
}
}实现初始化,读写字符,响应中断
/// The Pl011 Uart
///
/// The Pl011 Uart provides a programing interface for:
/// 1. Construct a new Pl011 UART instance
/// 2. Initialize the Pl011 UART
/// 3. Read a char from the UART
/// 4. Write a char to the UART
/// 5. Handle a UART IRQ
pub struct Pl011Uart {
base: NonNull<Pl011UartRegs>,
}
unsafe impl Send for Pl011Uart {}
unsafe impl Sync for Pl011Uart {}
impl Pl011Uart {
/// Constrcut a new Pl011 UART instance from the base address.
pub const fn new(base: *mut u8) -> Self {
Self {
base: NonNull::new(base).unwrap().cast(),
}
}
const fn regs(&self) -> &Pl011UartRegs {
unsafe { self.base.as_ref() }
}
/// Initializes the Pl011 UART.
///
/// It clears all irqs, sets fifo trigger level, enables rx interrupt, enables receives
pub fn init(&mut self) {
// clear all irqs
self.regs().icr.set(0x7ff);
// set fifo trigger level
self.regs().ifls.set(0); // 1/8 rxfifo, 1/8 txfifo.
// enable rx interrupt
self.regs().imsc.set(1 << 4); // rxim
// enable receive
self.regs().cr.set((1 << 0) | (1 << 8) | (1 << 9)); // tx enable, rx enable, uart enable
}
/// Output a char c to data register
pub fn putchar(&mut self, c: u8) {
while self.regs().fr.get() & (1 << 5) != 0 {}
self.regs().dr.set(c as u32);
}
/// Return a byte if pl011 has received, or it will return `None`.
pub fn getchar(&mut self) -> Option<u8> {
if self.regs().fr.get() & (1 << 4) == 0 {
Some(self.regs().dr.get() as u8)
} else {
None
}
}
/// Return true if pl011 has received an interrupt
pub fn is_receive_interrupt(&self) -> bool {
let pending = self.regs().mis.get();
pending & (1 << 4) != 0
}
/// Clear all interrupts
pub fn ack_interrupts(&mut self) {
self.regs().icr.set(0x7ff);
}
}I2C移植
注:I2C所涉及的代码位于usb_learnings1分支
查阅飞腾派官方文档得知,飞腾派的I2C硬件支持SMBUS,但其所在引脚与多个其他功能进行复用:

因此在进行I2C驱动的编写前,我们还需要对引脚做配置选择,总而言之,我们在这里参考了官方sdk的例程进行编写,其步骤如下:
-
初始化I/Opad引脚寄存器,包括功能寄存器地址,MIO寄存器地址以及中断编号 按照所选的配置的I/Opad引脚寄存器,以设置 I2C 的 SCL 和 SDA 引脚功能。
-
设置MIO配置,包括 ID号、MIO基地址、中断号、频率、设备地址 和 传输速率
//文件位置:crates/driver_i2c/src/example.rs //... pub unsafe fn FI2cMioMasterInit(address: u32, speed_rate: u32) -> bool { let mut input_cfg: FI2cConfig = FI2cConfig::default(); let mut config_p: FI2cConfig = FI2cConfig::default(); let mut status: bool = true; // MIO 初始化 master_mio_ctrl.config = FMioLookupConfig(1).unwrap(); status = FMioFuncInit(&mut master_mio_ctrl, 0b00); if status != true { debug!("MIO initialize error."); return false; } FIOPadSetFunc(&iopad_ctrl, 0x00D0u32, 5); /* scl */ FIOPadSetFunc(&iopad_ctrl, 0x00D4u32, 5); /* sda */ unsafe { core::ptr::write_bytes(&mut master_i2c_instance as *mut FI2c, 0, size_of::<FI2c>()); } // 查找默认配置 config_p = FI2cLookupConfig(1).unwrap(); // 获取 MIO 配置的默认引用 if !Some(config_p).is_some() { debug!("Config of mio instance {} not found.", 1); return false; } // 修改配置 input_cfg = config_p.clone(); input_cfg.instance_id = 1; input_cfg.base_addr = FMioFuncGetAddress(&master_mio_ctrl, 0b00); input_cfg.irq_num = FMioFuncGetIrqNum(&master_mio_ctrl, 0b00); input_cfg.ref_clk_hz = 50000000; input_cfg.slave_addr = address; input_cfg.speed_rate = speed_rate; // 初始化 status = FI2cCfgInitialize(&mut master_i2c_instance, &input_cfg); // 处理 FI2C_MASTER_INTR_EVT 中断的回调函数 master_i2c_instance.master_evt_handlers[0 as usize] = None; master_i2c_instance.master_evt_handlers[1 as usize] = None; master_i2c_instance.master_evt_handlers[2 as usize] = None; if status != true { debug!("Init mio master failed, ret: {:?}", status); return status; } debug!( "Set target slave_addr: 0x{:x} with mio-{}", input_cfg.slave_addr, 1 ); status } //... -
而后,就能开始进行正常的读写了:
//文件位置:crates/driver_i2c/src/lib.rs //... pub fn run_iicoled() { unsafe { let mut ret: bool = true; let address: u32 = 0x3c; let mut speed_rate: u32 = 100000; /*kb/s*/ FIOPadCfgInitialize(&mut iopad_ctrl, &FIOPadLookupConfig(0).unwrap()); ret = FI2cMioMasterInit(address, speed_rate); if ret != true { debug!("FI2cMioMasterInit mio_id {:?} is error!", 1); } let offset: u32 = 0x05; let input: &[u8] = b"012"; let input_len: u32 = input.len() as u32; let mut write_buf: [u8; 256] = [0; 256]; let mut read_buf: [u8; 256] = [0; 256]; unsafe { // 复制数据到 write_buf ptr::copy_nonoverlapping(input.as_ptr(), write_buf.as_mut_ptr(), input_len as usize); debug!("------------------------------------------------------"); debug!("write 0x{:x} len {}", offset, input_len); // 调用 FI2cMasterwrite let ret = FI2cMasterWrite(&mut write_buf, input_len, offset); if ret != true { debug!("FI2cMasterwrite error!"); return; } debug!("------------------------------------------------------"); // 调用 FI2cSlaveDump FI2cSlaveDump(); let read_buf = unsafe { slice::from_raw_parts_mut(read_buf.as_mut_ptr(), read_buf.len()) }; // 调用 FI2cMasterRead let ret = FI2cMasterRead(read_buf, input_len, offset); debug!("------------------------------------------------------"); if ret == true { debug!("Read {:?} len {:?}: {:?}.", offset, input_len, read_buf); FtDumpHexByte(read_buf.as_ptr(), input_len as usize); } debug!("------------------------------------------------------"); } } } //...
USB驱动
正文见下
USB驱动代码导读
前言-系统架构

在这张图中,我们可以看到这些要点:
-
主机驱动层:usb系统发展至今,已经到了第四代了,目前市面上大多数usb主机控制器都是usb3.0主机控制器-xhci(eXtensible Host Controller Interface),由于其可扩展性,因此usb4也在使用它,在可预见的将来,xhci还会存在相当长一段时间,但这并不意味着我们就可以忽略过去的几种主机控制器-ehci/ohci/uhci,甚至是在虚拟化的环境下-vhci,因此,对于不同的主机,抽象出一套统一的接口上有必要的。
-
驱动无关的设备抽象:usb协议的上层建筑,各种驱动千变万化,但是它们都有着共同的操作对象,因此我们在这里将所有驱动都会用到的设备数据抽象出来,进一步的说,其内包含:
-
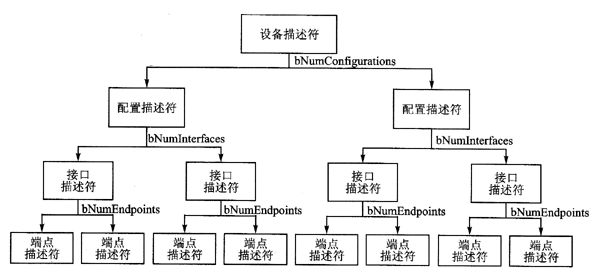
设备的描述符
-
设备的描述符通过控制传输从设备获取,由厂家定义,描述符为树形结构,其拓扑一般如下:
-
设备当前所使用的interface与config值与端点的概念
-
config-设备的配置-对应着上图中的配置描述符,有一个设备一次只能选择一个配置
-
interface-设备的功能,举个例子,无线鼠标接收器,在主机看来,其实往往是一个复合设备——他同时有鼠标/键盘/手柄的功能,每个功能都对应着一个接口描述符
-
endpoint-设备端点-对应着图中的端点描述符,“端点”在usb系统中,是主机与设备沟通的最小通道,端点本身也是一种状态机

在初始状态下,除了永远保持开启的0号端点(控制端点),其余端点都处于未被配置的Disabled状态,当一个配置被选择时,主机需要根据这个配置下的所有端点描述符对对应的端点做初始化(确定端点的传输方式,传输间隔,传输大小等)。
-
设备的slot id-当设备被插入时,主机就会为设备分配一个唯一的slot id,这么做的原因是物理接口往往是可扩展的,因此用物理接口号来识别设备会造成混淆
-
-
USB驱动层:这一层则是对USB协议的封装,与主机控制器的内容并不相关,就像是其他的常见usb主机侧驱动一样(比如:linux,windows,circle os,redox...)它们都有一种叫做URB(USB Request Block)的结构体,其内记录了发起一次usb请求所需要的全部信息,这些信息在主机驱动层被解析为不同的主机控制器所对应的特定操作。而在我们的usb系统中,我们也设计了类似的结构:
-
URB:我们的系统中也具有URB的概念,但与其他的系统略有不同
-
模版匹配:得益于rust强大的模版匹配机制,我们并不需要像其他系统一样设计一个庞大的结构体:
//... #[derive(Clone)] pub struct URB<'a, O> where O: PlatformAbstractions, { pub device_slot_id: usize, pub operation: RequestedOperation<'a>, pub sender: Option<Arc<SpinNoIrq<dyn USBSystemDriverModuleInstance<'a, O>>>>, } //... #[derive(Debug, Clone)] pub enum RequestedOperation<'a> { Control(ControlTransfer), Bulk, Interrupt(InterruptTransfer), Isoch, ConfigureDevice(Configuration<'a>), } #[derive(Debug, Clone)] pub struct ControlTransfer { pub request_type: bmRequestType, pub request: bRequest, pub index: u16, pub value: u16, pub data: Option<(usize, usize)>, } //...* 注意到RequestOperation这个枚举类型,其对应了usb的四种传输(控制,中断,块,同步)以及一种额外的请求:设备配置(如,为设备分配地址,硬重置设备端口等),在实际使用中,这种模式这给予了我们不同往日的灵活。 -
UCB:这个结构体包含了URB所发起的事件的完成信息(完成状态,是否有错误,回报信息),与urb形成了对称,当URB的时间完成时,UCB将会被创建,并通过URB中的“sender”字段所保存的请求发起者的引用,回报给请求发起者(即被驱动创建的设备实例)
-
-
驱动api:可以在图中看到,我们的驱动部分是可扩展的,甚至可以动态的加载驱动模块,有着非常巧妙的设计:
- 首先,我们的驱动采用部分工厂模式+状态机的思想,其api定义如下:
pub trait USBSystemDriverModule<'a, O>: Send + Sync where O: PlatformAbstractions, { fn should_active( &self, independent_dev: &DriverIndependentDeviceInstance<O>, config: Arc<SpinNoIrq<USBSystemConfig<O>>>, ) -> Option<Vec<Arc<SpinNoIrq<dyn USBSystemDriverModuleInstance<'a, O>>>>>; fn preload_module(&self); } pub trait USBSystemDriverModuleInstance<'a, O>: Send + Sync where O: PlatformAbstractions, { fn prepare_for_drive(&mut self) -> Option<Vec<URB<'a, O>>>; fn gather_urb(&mut self) -> Option<URB<'a, O>>; fn receive_complete_event(&mut self, event: event::Allowed); }-
USBSystemDriverModule:这是创建“驱动设备”的工厂,当有新设备被初始化完成时,usb层就会对每个驱动模块进行查询,当确定到有合适的驱动模块时,就会使对应的模块创建一个“驱动设备”的实例
-
USBSystemDriverModuleInstance:即上文所提到的“驱动设备”,该设备与下层的“驱动无关设备”并不耦合,具体的来说,驱动设备应当被设计为一种状态机,usb系统在开始运行后,就会在每个loop的通过轮询所有“驱动设备”的
gather_urb方法收集URB请求(根据驱动设备的状态,可能得到不同的,甚至干脆就没有URB,这些都是根据驱动设备的当前状态及其内部实现来决定的,我们称为-tick),在获取到了一大堆的URB后,就会将他们统一提交给主机控制器层,并等待任务完成后将UCB提交回驱动设备以改变驱动设备的状态(我们称为-tock) -
也就是说,在正常运行的前提下,我们整个usb系统都是在不断的进行"tick-tock",就像是时间轮一样:

代码结构
.
├── abstractions
│ ├── dma.rs
│ └── mod.rs
├── err.rs
├── glue
│ ├── driver_independent_device_instance.rs
│ ├── glue_usb_host.rs
│ └── mod.rs
├── host
│ ├── data_structures
│ │ ├── host_controllers
│ │ │ ├── mod.rs
│ │ │ └── xhci
│ │ │ ├── context.rs
│ │ │ ├── event_ring.rs
│ │ │ ├── mod.rs
│ │ │ └── ring.rs
│ │ └── mod.rs
│ └── mod.rs
├── lib.rs
└── usb
├── descriptors
│ ├── desc_configuration.rs
│ ├── desc_device.rs
│ ├── desc_endpoint.rs
│ ├── desc_hid.rs
│ ├── desc_interface.rs
│ ├── desc_str.rs
│ └── mod.rs
├── drivers
│ ├── driverapi.rs
│ └── mod.rs
├── mod.rs
├── operation
│ └── mod.rs
├── trasnfer
│ ├── control.rs
│ ├── endpoints
│ │ └── mod.rs
│ ├── interrupt.rs
│ └── mod.rs
├── universal_drivers
│ ├── hid_drivers
│ │ ├── hid_mouse.rs
│ │ └── mod.rs
│ └── mod.rs
└── urb.rs用驱动案例来解读:usb-hid鼠标驱动
让我们从一个usb-hid鼠标的实现开始,深入的看看代码到底是什么样的
//...
pub enum ReportDescState<O> //当前获取到的设备报告描述符,为了日后要编写的HID报文解析器的方便起见,我们在这里使用枚举类封装一次
where
O: PlatformAbstractions,
{
Binary(SpinNoIrq<DMA<u8, O::DMA>>),
Decoded(/*...待实现报文描述符解析器...*/),
}
//在以下的结构体中,我们需要注意的字段有这么几个
pub struct HidMouseDriver<O> //Hid鼠标-驱动设备实例-结构体
where
O: PlatformAbstractions,
{
config: Arc<SpinNoIrq<USBSystemConfig<O>>>,
bootable: usize,
//bootable:hid协议特有的,bootable类型的设备会在bios中返回更丰富的数据
device_slot_id: usize,
//这个字段从逻辑上将当前的“驱动设备”绑定到下层的“驱动无关设备”
interrupt_in_channels: Vec<u32>,
//中断输入端点集合,这部分由协议与设备的描述符共同决定,因此放在这里
interrupt_out_channels: Vec<u32>,
//中断输出端点集合,这部分由协议与设备的描述符共同决定,因此放在这里
interface_value: usize, //interface配置值
interface_alternative_value: usize,//interface-子配置配置值
config_value: usize,//设备配置配置值
//以上三个配置值理论上应该是有Arc作为指针索引到驱动无关设备的相应字段,
//但这么做开销略大,因此在本地保存一份复制
report_descriptor: Option<ReportDescState<O>>,
/*
设备报告描述符-初始为None,
当获取到二进制值后转换为Some(ReportDescState::Binary(buffer)),
经过解析应当后转换为Some(ReportDescState::Decoded(descriptor))
*/
driver_state_machine: HidMouseStateMachine,
/*
这个驱动的重要组成部分-甚至可以说是核心:一个状态机
一共有两种状态:待发送和等待
*/
receiption_buffer: Option<SpinNoIrq<DMA<[u8], O::DMA>>>,
/*
数据缓冲区,见下文
*/
}
pub enum HidMouseStateMachine { //状态机从代码上实现为枚举类型
Waiting, //等待状态
Sending,//待发送
}
impl<'a, O> HidMouseDriver<O>
where
O: PlatformAbstractions + 'static,
{
fn new_and_init( //驱动设备通过这个方法创建出来
device_slot_id: usize,
bootable: u8,
endpoints: Vec<Endpoint>,
config: Arc<SpinNoIrq<USBSystemConfig<O>>>,
interface_value: usize,
alternative_val: usize,
config_value: usize,
) -> Arc<SpinNoIrq<dyn USBSystemDriverModuleInstance<'a, O>>> {
Arc::new(SpinNoIrq::new(Self {
device_slot_id,
interrupt_in_channels: {
endpoints
.iter()
.filter_map(|ep| match ep.endpoint_type() {
EndpointType::InterruptIn => Some(ep.doorbell_value_aka_dci()),
_ => None,
})
.collect()
},
interrupt_out_channels: {
endpoints
.iter()
.filter_map(|ep| match ep.endpoint_type() {
EndpointType::InterruptOut => Some(ep.doorbell_value_aka_dci()),
_ => None,
})
.collect()
},
config,
interface_value,
config_value,
interface_alternative_value: alternative_val,
bootable: bootable as usize,
report_descriptor: None,
driver_state_machine: HidMouseStateMachine::Sending,
receiption_buffer: None,
}))
}
}
/*
为所有的 HidMouseDriver实现USBSystemDriverModuleInstance这个trait
以防读者不熟悉rust,特意说下,这里是rust的特殊之处,在rust中,并不存在面向对象
相反的,我们更倾向于面向数据:数据从何而来?到哪里去?
这种思想落实到这里,就是指trait-一种比接口更灵活的"行为模板",当一个结构体实现了某种trait
就意味着这个结构体实现了这种trait的所有特性。
在这里,USBSystemDriverModuleInstance-就是驱动设备应当有的行为的封装trait,其内包含三个方法:
gather_urb:在每次tick时,usb系统从这里收集各个驱动设备所提交的urb
receive_complete_event:在每次tock时,将urb的执行结果回传给这个方法,以改变状态机
prepare_for_drive:不同的驱动意味着不同的协议,不同的协议往往有着各自自定义的初始化操作
这个方法就是为了在正常工作前,进行不同协议所定义的设备初始化
*/
impl<'a, O> USBSystemDriverModuleInstance<'a, O> for HidMouseDriver<O>
where
O: PlatformAbstractions,
{
fn gather_urb(&mut self) -> Option<Vec<crate::usb::urb::URB<'a, O>>> {
match self.driver_state_machine {
HidMouseStateMachine::Waiting => None,
//如果当前的状态机为等待状态,那就不发出URB
HidMouseStateMachine::Sending => {
//如果当前的状态机为待发送状态,那么...
self.driver_state_machine = HidMouseStateMachine::Waiting;
//发送了URB后会转换为等待状态
match &self.receiption_buffer {
Some(buffer) => buffer.lock().fill_with(|| 0u8),
None => {
self.receiption_buffer = Some(SpinNoIrq::new(DMA::new_vec(
0u8,
8,
O::PAGE_SIZE,
self.config.lock().os.dma_alloc(),
)))
}
}
//如果数据交换buffer还没被创建,就创建一个,并将buffer清零
if let Some(buffer) = &mut self.receiption_buffer {
trace!("some!");
return Some(vec![URB::<O>::new(
self.device_slot_id,
RequestedOperation::Interrupt(InterruptTransfer {
endpoint_id: self.interrupt_in_channels.last().unwrap().clone()
as usize,
buffer_addr_len: buffer.lock().addr_len_tuple(),
}),
)]);
//发送一次URB,这个URB包含一次中断传输请求,以及发起请求所需要的所有参数
}
None
}
}
}
fn receive_complete_event(&mut self, ucb: UCB<O>) {
//当收到UCB时
match ucb.code {
crate::glue::ucb::CompleteCode::Event(TransferEventCompleteCode::Success) => {
//如果收到的UCB表面传输完成
trace!("completed!");
self.receiption_buffer
.as_ref()
.map(|a| a.lock().to_vec().clone())
.inspect(|a| {
trace!("current buffer:{:?}", a);
//那就说明buffer里已经被填充了回报回来的数据,取出并打印
});
self.driver_state_machine = HidMouseStateMachine::Sending
//并且将当前状态变回待发送,以待下次tick时继续发送中断传输请求
}
other => panic!("received {:?}", other),
//如果收到的UCB表明出现了错误,那么我们就让系统直接panic
//这部分的处理看似过于粗暴,但实际上是合理的——经过初始化阶段的过滤,驱动必然找到了合适的设备
//也就是说这个驱动设备必定能正常工作,如果没有,那就说明是硬件的问题
//在这种情况下,软件无法做更多事,只能panic以发出警告
}
}
fn prepare_for_drive(&mut self) -> Option<Vec<URB<'a, O>>> {
//一些hid所规定的特定操作,我们仅挑几处关键的位置讲解
trace!("hid mouse preparing for drive!");
let endpoint_in = self.interrupt_in_channels.last().unwrap();
let mut todo_list = Vec::new();
todo_list.push(URB::new(
self.device_slot_id,
RequestedOperation::Control(ControlTransfer {
request_type: bmRequestType::new(
Direction::Out,
DataTransferType::Standard,
Recipient::Device,
),
request: bRequest::SetConfiguration, //设置设备的配置
index: self.interface_value as u16,
value: self.config_value as u16,
data: None,
}),
));
todo_list.push(URB::new(
self.device_slot_id,
RequestedOperation::Control(ControlTransfer {
request_type: bmRequestType::new(
Direction::Out,
DataTransferType::Standard,
Recipient::Interface,
),
request: bRequest::SetInterfaceSpec, //设置设备的接口
index: self.interface_alternative_value as u16,
value: self.interface_value as u16,
data: None,
}),
));
if self.bootable > 0 {
todo_list.push(URB::new(
self.device_slot_id,
RequestedOperation::Control(ControlTransfer {
request_type: bmRequestType::new(
Direction::Out,
DataTransferType::Class,
Recipient::Interface,
),
request: bRequest::SetInterfaceSpec, //设置设备的协议-即关闭设备的boot模式
index: if self.bootable == 2 { 1 } else { 0 },
value: self.interface_value as u16,
data: None,
}),
));
}
self.report_descriptor = Some(ReportDescState::<O>::Binary(SpinNoIrq::new(DMA::new(
0u8,
O::PAGE_SIZE,
self.config.lock().os.dma_alloc(),
)))); //初始化报文描述符的buffer-用于接收设备回报回来的描述信息
if let Some(ReportDescState::Binary(buf)) = &self.report_descriptor {
todo_list.push(URB::new(
self.device_slot_id,
RequestedOperation::Control(ControlTransfer {
request_type: bmRequestType::new(
Direction::In,
DataTransferType::Standard,
Recipient::Interface,
),
request: bRequest::GetDescriptor,
//获取设备的报文描述符
index: self.interface_alternative_value as u16,
value: DescriptorType::HIDReport.forLowBit(0).bits(),
data: Some({ buf.lock().addr_len_tuple() }),
//这里实际上产生了一个元组:(buffer地址,buffer长度)
}),
));
}
self.interrupt_in_channels
.iter()
.chain(self.interrupt_out_channels.iter())
.for_each(|dci| {
todo_list.push(URB::new(
self.device_slot_id,
RequestedOperation::ExtraStep(ExtraStep::PrepareForTransfer(*dci as _)),
//通知主机准备进行传输,让主机层进行属于主机层的特定初始化操作
//这里仅仅是发出了通知,并无数据传输,工作的主体在主机层
));
});
Some(todo_list)
}
}
pub struct HidMouseDriverModule; //驱动模块
//驱动模块和驱动设备有什么关系?当然是驱动模块会产生驱动设备
impl<'a, O> USBSystemDriverModule<'a, O> for HidMouseDriverModule
where
O: PlatformAbstractions + 'static,
{
fn should_active(
//这个函数非常庞大,但其实质是在根据设备的描述符决定要不要启用当前模块
&self,
independent_dev: &DriverIndependentDeviceInstance<O>,
config: Arc<SpinNoIrq<USBSystemConfig<O>>>,
) -> Option<Vec<Arc<SpinNoIrq<dyn USBSystemDriverModuleInstance<'a, O>>>>> {
if let MightBeInited::Inited(inited) = &independent_dev.descriptors {
let device = inited.device.first().unwrap();
return match (
USBDeviceClassCode::from_u8(device.data.class),
USBHidDeviceSubClassCode::from_u8(device.data.subclass),
device.data.protocol,
) {
(
Some(USBDeviceClassCode::HID),
Some(USBHidDeviceSubClassCode::Mouse),
bootable,
) => {
return Some(vec![HidMouseDriver::new_and_init(
independent_dev.slotid,
bootable,
{
device
.child
.iter()
.find(|c| {
c.data.config_val() == independent_dev.configuration_val as u8
})
.expect("configuration not found")
.child
.iter()
.filter_map(|func| match func {
TopologicalUSBDescriptorFunction::InterfaceAssociation(_) => {
panic!("a super complex device, help meeeeeeeee!");
}
TopologicalUSBDescriptorFunction::Interface(interface) => Some(
interface
.iter()
.find(|(interface, alternatives, endpoints)| {
interface.interface_number
== independent_dev.interface_val as u8
&& interface.alternate_setting
== independent_dev
.current_alternative_interface_value
as u8
})
.expect("invalid interface value or alternative value")
.2
.clone(),
),
})
.take(1)
.flat_map(|a| a)
.collect()
},
config.clone(),
independent_dev.interface_val,
independent_dev.current_alternative_interface_value,
independent_dev.configuration_val,
)]);
}
(Some(USBDeviceClassCode::ReferInterfaceDescriptor), _, _) => Some({
let collect = device
.child
.iter()
.find(|configuration| {
configuration.data.config_val()
== independent_dev.configuration_val as u8
})
.expect("configuration not found")
.child
.iter()
.filter_map(|interface| match interface {
TopologicalUSBDescriptorFunction::InterfaceAssociation((
asso,
interfaces,
)) if let (
USBDeviceClassCode::HID,
USBHidDeviceSubClassCode::Mouse,
bootable,
) = (
USBDeviceClassCode::from_u8(asso.function_class).unwrap(),
USBHidDeviceSubClassCode::from_u8(asso.function_subclass).unwrap(),
asso.function_protocol,
) =>
{
// return Some(Self::new_and_init(independent_dev.slotid, bootable));
panic!("a super complex device, help meeeeeeeee!");
}
TopologicalUSBDescriptorFunction::Interface(interfaces) => {
let (interface, additional, endpoints) = interfaces
.get(independent_dev.current_alternative_interface_value)
.expect("invalid anternative interface value");
if let (
Some(USBDeviceClassCode::HID),
Some(USBHidDeviceSubClassCode::Mouse),
bootable,
) = (
USBDeviceClassCode::from_u8(interface.interface_class),
USBHidDeviceSubClassCode::from_u8(interface.interface_subclass),
interface.interface_protocol,
) {
return Some(HidMouseDriver::new_and_init(
independent_dev.slotid,
bootable,
endpoints.clone(),
config.clone(),
independent_dev.interface_val,
independent_dev.current_alternative_interface_value,
independent_dev.configuration_val,
));
} else {
None
}
}
_ => None,
})
.collect();
collect
}),
_ => None,
};
}
None
}
fn preload_module(&self) {
//一些模块加载前会执行的操作-这个方法存在的目的是留给后来者进行二次开发的空间
trace!("preloading Hid mouse driver!")
}
}在我们的usb系统下,鼠标驱动的部分就这些,接下来让我们跟踪发出去的URB被处理的路径:
//...
pub fn tick(&mut self) -> Vec<Vec<URB<'a, O>>> {
self.driver_device_instances
//驱动设备实例集合-这个变量所代表集合保存了所有的驱动设备实例
.iter()
.filter_map(|drv_dev| {
drv_dev
.lock()
//是的,我们给这些驱动设备上了锁-我们是以异步+中断的编程模型来设计usb系统的
//但是由于设计的合理,我们也可以使用同步+轮询的运作方式
.gather_urb()
//对每个驱动设备收集一次URB请求集合-一个驱动设备不一定只会提交一个URB
.map(|mut vec| {
vec.iter_mut()
.for_each(|urb| urb.set_sender(drv_dev.clone()));
//一些额外的工作-为这些urb标注好请求发起者
vec
})
})
.collect()
}
//...然后是tick-tock的核心:
pub fn drive_all(mut self) -> Self {
loop {
let tick = self.usb_driver_layer.tick(); //usb层进行tick!
if tick.len() != 0 { //如果没有设备发出请求,那就直接开始下一次tick
trace!("tick! {:?}", tick.len());
self.host_driver_layer.tock(tick); //主机层进行tock!
}
}
self
}接下来看看tock
pub struct USBHostSystem<O>
where
O: PlatformAbstractions,
{
config: Arc<SpinNoIrq<USBSystemConfig<O>>>,
//主机层也会保存一份整个USB系统配置项的引用
controller: ControllerArc<O>,
//主机层实际上只会包含一个主机-目前为止少有多xhci主机的硬件案例,但日后也可以轻易扩展
}
impl<O> USBHostSystem<O>
where
O: PlatformAbstractions + 'static,
{
pub fn new(config: Arc<SpinNoIrq<USBSystemConfig<O>>>) -> crate::err::Result<Self> {
//创建主机层的函数
let controller = Arc::new(SpinNoIrq::new({
let xhciregisters: Box<(dyn Controller<O> + 'static)> = {
if cfg!(feature = "xhci") {
Box::new(XHCI::new(config.clone()))
} else {
panic!("no host controller defined")
}
};
xhciregisters
}));
Ok(Self { config, controller })
}
pub fn init(&self) {
//主机层的初始化函数
self.controller.lock().init();
trace!("controller init complete");
}
pub fn probe<F>(&self, consumer: F)
where
F: FnMut(DriverIndependentDeviceInstance<O>),
{
//枚举所有连接上来的硬件设备,并为他们创建对应的驱动无关设备实例
let mut probe = self.controller.lock().probe();
probe
.iter()
.map(|slot_id| {
DriverIndependentDeviceInstance::new(slot_id.clone(), self.controller.clone())
})
.for_each(consumer);
}
pub fn control_transfer(
&mut self,
dev_slot_id: usize,
urb_req: ControlTransfer,
) -> crate::err::Result<UCB<O>> {
self.controller
.lock()
.control_transfer(dev_slot_id, urb_req)
}
pub fn configure_device(
&mut self,
dev_slot_id: usize,
urb_req: Configuration,
) -> crate::err::Result<UCB<O>> {
self.controller
.lock()
.configure_device(dev_slot_id, urb_req)
}
pub fn urb_request(&mut self, request: URB<O>) -> crate::err::Result<UCB<O>> {
//urb分发-这部分将不同的urb分配给对应的的操作实现函数
match request.operation {
usb::urb::RequestedOperation::Control(control) => {
//控制传输-USB主协议所规定的,用于配置/读取usb设备的传输
trace!("request transfer!");
self.control_transfer(request.device_slot_id, control)
}
usb::urb::RequestedOperation::Bulk => todo!(),
//块传输-用于文件传输
usb::urb::RequestedOperation::Interrupt(interrupt_transfer) => self
//中断传输-用于HID设备这类对同步性要求不高的任务
.controller
.lock()
.interrupt_transfer(request.device_slot_id, interrupt_transfer),
usb::urb::RequestedOperation::Isoch => todo!(),
//同步传输-用于usb摄像头这类要求高同步率的任务
usb::urb::RequestedOperation::ConfigureDevice(configure) => self
//设备配置-进行设备配置相关的任务
.controller
.lock()
.configure_device(request.device_slot_id, configure),
usb::urb::RequestedOperation::ExtraStep(step) => self
//额外步骤-进行一些特殊任务
.controller
.lock()
.extra_step(request.device_slot_id, step),
}
}
pub fn tock(&mut self, todo_list_list: Vec<Vec<URB<O>>>) {
trace!("tock! check deadlock!");
todo_list_list.iter().for_each(|list| {
list.iter().for_each(|todo| {
if let Ok(ok) = self.urb_request(todo.clone())
&& let Some(sender) = &todo.sender
{
//发送一次URB请求并等待完成,如果有表明任务发起者
trace!("tock! check deadlock! 2");
sender.lock().receive_complete_event(ok);
//那就调用对应的发起者的完成函数
//这里可以很轻易的改成异步的方式-仅需要将urb_request改成async的就行!
};
})
})
}
}接下来让我们看看主机层在xhci上的实现:
注意-这仅仅是单个文件的代码量
//...
pub type RegistersBase = xhci::Registers<MemMapper>;
pub type RegistersExtList = xhci::extended_capabilities::List<MemMapper>;
pub type SupportedProtocol = XhciSupportedProtocol<MemMapper>;
const TAG: &str = "[XHCI]";
#[derive(Clone)]
pub struct MemMapper;
impl Mapper for MemMapper {
unsafe fn map(&mut self, phys_start: usize, bytes: usize) -> NonZeroUsize {
return NonZeroUsize::new_unchecked(phys_start);
}
fn unmap(&mut self, virt_start: usize, bytes: usize) {}
}
//以上为一些常量及类型缩写的定义
pub struct XHCI<O>
where
O: PlatformAbstractions,
{
config: Arc<SpinNoIrq<USBSystemConfig<O>>>,
pub regs: RegistersBase,
pub ext_list: Option<RegistersExtList>,
max_slots: u8,
max_ports: u8,
max_irqs: u16,
scratchpad_buf_arr: Option<ScratchpadBufferArray<O>>,
cmd: Ring<O>,
event: EventRing<O>,
pub dev_ctx: DeviceContextList<O>,
}//xhci主机实例
impl<O> XHCI<O>
//为xhci主机创建一些函数,读者暂时不用关心这些——这些都是操作硬件的实现细节
//如果读者对此感兴趣——我们在这里做的基本上就是将xhci规范第四章给完整实现了一遍
where
O: PlatformAbstractions,
{
pub fn supported_protocol(&mut self, port: usize) -> Option<SupportedProtocol> {
debug!("[XHCI] Find port {} protocol", port);
if let Some(ext_list) = &mut self.ext_list {
ext_list
.into_iter()
.filter_map(|one| {
if let Ok(ExtendedCapability::XhciSupportedProtocol(protcol)) = one {
return Some(protcol);
}
None
})
.find(|p| {
let head = p.header.read_volatile();
let port_range = head.compatible_port_offset() as usize
..head.compatible_port_count() as usize;
port_range.contains(&port)
})
} else {
None
}
}
fn chip_hardware_reset(&mut self) -> &mut Self {
debug!("{TAG} Reset begin");
debug!("{TAG} Stop");
self.regs.operational.usbcmd.update_volatile(|c| {
c.clear_run_stop();
});
debug!("{TAG} Until halt");
while !self.regs.operational.usbsts.read_volatile().hc_halted() {}
debug!("{TAG} Halted");
let mut o = &mut self.regs.operational;
// debug!("xhci stat: {:?}", o.usbsts.read_volatile());
debug!("{TAG} Wait for ready...");
while o.usbsts.read_volatile().controller_not_ready() {}
debug!("{TAG} Ready");
o.usbcmd.update_volatile(|f| {
f.set_host_controller_reset();
});
while o.usbcmd.read_volatile().host_controller_reset() {}
debug!("{TAG} Reset HC");
while self
.regs
.operational
.usbcmd
.read_volatile()
.host_controller_reset()
|| self
.regs
.operational
.usbsts
.read_volatile()
.controller_not_ready()
{}
info!("{TAG} XCHI reset ok");
self
}
fn set_max_device_slots(&mut self) -> &mut Self {
let max_slots = self.max_slots;
debug!("{TAG} Setting enabled slots to {}.", max_slots);
self.regs.operational.config.update_volatile(|r| {
r.set_max_device_slots_enabled(max_slots);
});
self
}
fn set_dcbaap(&mut self) -> &mut Self {
let dcbaap = self.dev_ctx.dcbaap();
debug!("{TAG} Writing DCBAAP: {:X}", dcbaap);
self.regs.operational.dcbaap.update_volatile(|r| {
r.set(dcbaap as u64);
});
self
}
fn set_cmd_ring(&mut self) -> &mut Self {
let crcr = self.cmd.register();
let cycle = self.cmd.cycle;
let regs = &mut self.regs;
debug!("{TAG} Writing CRCR: {:X}", crcr);
regs.operational.crcr.update_volatile(|r| {
r.set_command_ring_pointer(crcr);
if cycle {
r.set_ring_cycle_state();
} else {
r.clear_ring_cycle_state();
}
});
self
}
fn start(&mut self) -> &mut Self {
let regs = &mut self.regs;
debug!("{TAG} Start run");
regs.operational.usbcmd.update_volatile(|r| {
r.set_run_stop();
});
while regs.operational.usbsts.read_volatile().hc_halted() {}
info!("{TAG} Is running");
regs.doorbell.update_volatile_at(0, |r| {
r.set_doorbell_stream_id(0);
r.set_doorbell_target(0);
});
self
}
fn init_ir(&mut self) -> &mut Self {
debug!("{TAG} Disable interrupts");
let regs = &mut self.regs;
regs.operational.usbcmd.update_volatile(|r| {
r.clear_interrupter_enable();
});
let mut ir0 = regs.interrupter_register_set.interrupter_mut(0);
{
debug!("{TAG} Writing ERSTZ");
ir0.erstsz.update_volatile(|r| r.set(1));
let erdp = self.event.erdp();
debug!("{TAG} Writing ERDP: {:X}", erdp);
ir0.erdp.update_volatile(|r| {
r.set_event_ring_dequeue_pointer(erdp);
});
let erstba = self.event.erstba();
debug!("{TAG} Writing ERSTBA: {:X}", erstba);
ir0.erstba.update_volatile(|r| {
r.set(erstba);
});
ir0.imod.update_volatile(|im| {
im.set_interrupt_moderation_interval(0);
im.set_interrupt_moderation_counter(0);
});
debug!("{TAG} Enabling primary interrupter.");
ir0.iman.update_volatile(|im| {
im.set_interrupt_enable();
});
}
// };
// self.setup_scratchpads(buf_count);
self
}
fn get_speed(&self, port: usize) -> u8 {
self.regs
.port_register_set
.read_volatile_at(port)
.portsc
.port_speed()
}
fn parse_default_max_packet_size_from_port(&self, port: usize) -> u16 {
match self.get_speed(port) {
1 | 3 => 64,
2 => 8,
4 => 512,
v => unimplemented!("PSI: {}", v),
}
}
fn reset_cic(&mut self) -> &mut Self {
let regs = &mut self.regs;
let cic = regs
.capability
.hccparams2
.read_volatile()
.configuration_information_capability();
regs.operational.config.update_volatile(|r| {
if cic {
r.set_configuration_information_enable();
} else {
r.clear_configuration_information_enable();
}
});
self
}
fn reset_ports(&mut self) -> &mut Self {
let regs = &mut self.regs;
let port_len = regs.port_register_set.len();
for i in 0..port_len {
debug!("{TAG} Port {} start reset", i,);
regs.port_register_set.update_volatile_at(i, |port| {
port.portsc.set_0_port_enabled_disabled();
port.portsc.set_port_reset();
});
while regs
.port_register_set
.read_volatile_at(i)
.portsc
.port_reset()
{}
debug!("{TAG} Port {} reset ok", i);
}
self
}
fn setup_scratchpads(&mut self) -> &mut Self {
let scratchpad_buf_arr = {
let buf_count = {
let count = self
.regs
.capability
.hcsparams2
.read_volatile()
.max_scratchpad_buffers();
debug!("{TAG} Scratch buf count: {}", count);
count
};
if buf_count == 0 {
error!("buf count=0,is it a error?");
return self;
}
let scratchpad_buf_arr =
ScratchpadBufferArray::new(buf_count, self.config.lock().os.clone());
self.dev_ctx.dcbaa[0] = scratchpad_buf_arr.register() as u64;
debug!(
"{TAG} Setting up {} scratchpads, at {:#0x}",
buf_count,
scratchpad_buf_arr.register()
);
scratchpad_buf_arr
};
self.scratchpad_buf_arr = Some(scratchpad_buf_arr);
self
}
fn test_cmd(&mut self) -> &mut Self {
//TODO:assert like this in runtime if build with debug mode?
debug!("{TAG} Test command ring");
for _ in 0..3 {
let completion = self
.post_cmd(command::Allowed::Noop(command::Noop::new()))
.unwrap();
}
debug!("{TAG} Command ring ok");
self
}
fn post_cmd(&mut self, mut trb: command::Allowed) -> crate::err::Result<CommandCompletion> {
let addr = self.cmd.enque_command(trb);
self.regs.doorbell.update_volatile_at(0, |r| {
r.set_doorbell_stream_id(0);
r.set_doorbell_target(0);
});
fence(Ordering::Release);
let r = self.event_busy_wait_cmd(addr as _)?;
/// update erdp
self.regs
.interrupter_register_set
.interrupter_mut(0)
.erdp
.update_volatile(|f| {
f.set_event_ring_dequeue_pointer(self.event.erdp());
});
Ok(r)
}
fn event_busy_wait_cmd(&mut self, addr: u64) -> crate::err::Result<CommandCompletion> {
debug!("Wait result");
loop {
if let Some((event, cycle)) = self.event.next() {
match event {
event::Allowed::CommandCompletion(c) => {
let mut code = CompletionCode::Invalid;
if let Ok(c) = c.completion_code() {
code = c;
} else {
continue;
}
trace!(
"[CMD] << {code:#?} @{:X} got result, cycle {}",
c.command_trb_pointer(),
c.cycle_bit()
);
if c.command_trb_pointer() != addr {
continue;
}
if let CompletionCode::Success = code {
return Ok(c);
}
return Err(Error::CMD(code));
}
_ => warn!("event: {:?}", event),
}
}
}
}
fn trace_dump_context(&self, slot_id: usize) {
let dev = &self.dev_ctx.device_out_context_list[slot_id];
trace!(
"slot {} {:?}",
slot_id,
DeviceHandler::slot(&**dev).slot_state()
);
for i in 1..32 {
if let EndpointState::Disabled = dev.endpoint(i).endpoint_state() {
continue;
}
trace!(" ep dci {}: {:?}", i, dev.endpoint(i).endpoint_state());
}
}
fn append_port_to_route_string(route_string: u32, port_id: usize) -> u32 {
let mut route_string = route_string;
for tier in 0..5 {
if route_string & (0x0f << (tier * 4)) == 0 {
if tier < 5 {
route_string |= (port_id as u32) << (tier * 4);
return route_string;
}
}
}
route_string
}
fn ep_ring_mut(&mut self, device_slot_id: usize, dci: u8) -> &mut Ring<O> {
trace!("fetch transfer ring at slot{}-dci{}", device_slot_id, dci);
&mut self.dev_ctx.transfer_rings[device_slot_id][dci as usize - 1]
}
fn update_erdp(&mut self) {
self.regs
.interrupter_register_set
.interrupter_mut(0)
.erdp
.update_volatile(|f| {
f.set_event_ring_dequeue_pointer(self.event.erdp());
});
}
fn event_busy_wait_transfer(&mut self, addr: u64) -> crate::err::Result<event::TransferEvent> {
trace!("Wait result @{addr:#X}");
loop {
// sleep(Duration::from_millis(2));
if let Some((event, cycle)) = self.event.next() {
self.update_erdp();
match event {
event::Allowed::TransferEvent(c) => {
let code = c.completion_code().unwrap();
trace!(
"[Transfer] << {code:#?} @{:#X} got result{}, cycle {}, len {}",
c.trb_pointer(),
code as usize,
c.cycle_bit(),
c.trb_transfer_length()
);
// if c.trb_pointer() != addr {
// debug!(" @{:#X} != @{:#X}", c.trb_pointer(), addr);
// // return Err(Error::Pip);
// continue;
// }
trace!("code:{:?},pointer:{:x}", code, c.trb_pointer());
if CompletionCode::Success == code || CompletionCode::ShortPacket == code {
return Ok(c);
}
debug!("error!");
return Err(Error::CMD(code));
}
_ => warn!("event: {:?}", event),
}
}
}
}
fn setup_device(
&mut self,
device_slot_id: usize,
configure: &TopologicalUSBDescriptorConfiguration,
) -> crate::err::Result<UCB<O>> {
configure.child.iter().for_each(|func| match func {
crate::usb::descriptors::TopologicalUSBDescriptorFunction::InterfaceAssociation(_) => {
todo!()
}
crate::usb::descriptors::TopologicalUSBDescriptorFunction::Interface(interfaces) => {
let (interface0, attributes, endpoints) = interfaces.first().unwrap();
let input_addr = {
{
let input =
self.dev_ctx.device_input_context_list[device_slot_id].deref_mut();
{
let control_mut = input.control_mut();
control_mut.set_add_context_flag(0);
control_mut.set_configuration_value(configure.data.config_val());
control_mut.set_interface_number(interface0.interface_number);
control_mut.set_alternate_setting(interface0.alternate_setting);
}
let entries = endpoints
.iter()
.map(|endpoint| endpoint.doorbell_value_aka_dci())
.max()
.unwrap_or(1);
input
.device_mut()
.slot_mut()
.set_context_entries(entries as u8);
}
// debug!("endpoints:{:#?}", interface.endpoints);
for ep in endpoints {
let dci = ep.doorbell_value_aka_dci() as usize;
let max_packet_size = ep.max_packet_size;
let ring_addr = self.ep_ring_mut(device_slot_id, dci as _).register();
let input =
self.dev_ctx.device_input_context_list[device_slot_id].deref_mut();
let control_mut = input.control_mut();
debug!("init ep {} {:?}", dci, ep.endpoint_type());
control_mut.set_add_context_flag(dci);
let ep_mut = input.device_mut().endpoint_mut(dci);
ep_mut.set_interval(3);
ep_mut.set_endpoint_type(ep.endpoint_type());
ep_mut.set_tr_dequeue_pointer(ring_addr);
ep_mut.set_max_packet_size(max_packet_size);
ep_mut.set_error_count(3);
ep_mut.set_dequeue_cycle_state();
let endpoint_type = ep.endpoint_type();
match endpoint_type {
EndpointType::Control => {}
EndpointType::BulkOut | EndpointType::BulkIn => {
ep_mut.set_max_burst_size(0);
ep_mut.set_max_primary_streams(0);
}
EndpointType::IsochOut
| EndpointType::IsochIn
| EndpointType::InterruptOut
| EndpointType::InterruptIn => {
//init for isoch/interrupt
ep_mut.set_max_packet_size(max_packet_size & 0x7ff); //refer xhci page 162
ep_mut.set_max_burst_size(
((max_packet_size & 0x1800) >> 11).try_into().unwrap(),
);
ep_mut.set_mult(0); //always 0 for interrupt
if let EndpointType::IsochOut | EndpointType::IsochIn =
endpoint_type
{
ep_mut.set_error_count(0);
}
ep_mut.set_tr_dequeue_pointer(ring_addr);
ep_mut.set_max_endpoint_service_time_interval_payload_low(4);
//best guess?
}
EndpointType::NotValid => {
unreachable!("Not Valid Endpoint should not exist.")
}
}
}
let input = self.dev_ctx.device_input_context_list[device_slot_id].deref_mut();
(input as *const Input<16>).addr() as u64
};
let command_completion = self
.post_cmd(command::Allowed::ConfigureEndpoint(
*command::ConfigureEndpoint::default()
.set_slot_id(device_slot_id as _)
.set_input_context_pointer(input_addr),
))
.unwrap();
self.trace_dump_context(device_slot_id);
match command_completion.completion_code() {
Ok(ok) => match ok {
CompletionCode::Success => {
UCB::<O>::new(CompleteCode::Event(TransferEventCompleteCode::Success))
}
other => panic!("err:{:?}", other),
},
Err(err) => {
UCB::new(CompleteCode::Event(TransferEventCompleteCode::Unknown(err)))
}
};
}
});
//TODO: Improve
Ok(UCB::new(CompleteCode::Event(
TransferEventCompleteCode::Success,
)))
}
fn prepare_transfer_normal(&mut self, device_slot_id: usize, dci: u8) {
//in our code , the init state of transfer ring always has ccs = 0, so we use ccs =1 to fill transfer ring
let mut normal = transfer::Normal::default();
normal.set_cycle_bit();
let ring = self.ep_ring_mut(device_slot_id, dci);
ring.enque_trbs(vec![normal.into_raw(); 31]) //the 32 is link trb
}
}
impl<O> Controller<O> for XHCI<O>
//这里是重点-为XHCI实现一个主机控制器应该有的行为
where
O: PlatformAbstractions,
{
fn new(config: Arc<SpinNoIrq<USBSystemConfig<O>>>) -> Self
//主机控制器的创建
where
Self: Sized,
{
let mmio_base = config.lock().base_addr.clone().into();
unsafe {
let regs = RegistersBase::new(mmio_base, MemMapper);
let ext_list =
RegistersExtList::new(mmio_base, regs.capability.hccparams1.read(), MemMapper);
// let version = self.core_mut().regs.capability.hciversion.read_volatile();
// info!("xhci version: {:x}", version.get());
let hcsp1 = regs.capability.hcsparams1.read_volatile();
let max_slots = hcsp1.number_of_device_slots();
let max_ports = hcsp1.number_of_ports();
let max_irqs = hcsp1.number_of_interrupts();
let page_size = regs.operational.pagesize.read_volatile().get();
debug!(
"{TAG} Max_slots: {}, max_ports: {}, max_irqs: {}, page size: {}",
max_slots, max_ports, max_irqs, page_size
);
let dev_ctx = DeviceContextList::new(max_slots, config.clone());
// Create the command ring with 4096 / 16 (TRB size) entries, so that it uses all of the
// DMA allocation (which is at least a 4k page).
let entries_per_page = O::PAGE_SIZE / mem::size_of::<ring::TrbData>();
let cmd = Ring::new(config.lock().os.clone(), entries_per_page, true).unwrap();
let event = EventRing::new(config.lock().os.clone()).unwrap();
debug!("{TAG} ring size {}", cmd.len());
Self {
regs,
ext_list,
config: config.clone(),
max_slots: max_slots,
max_ports: max_ports,
max_irqs: max_irqs,
scratchpad_buf_arr: None,
cmd: cmd,
event: event,
dev_ctx: dev_ctx,
}
}
}
fn init(&mut self) {
//主机控制器的初始化-链式调用很爽,这里都是xhci的特定操作
//顺序遵循XHCI规范的第四章的要求。
self.chip_hardware_reset()
.set_max_device_slots()
.set_dcbaap()
.set_cmd_ring()
.init_ir()
.setup_scratchpads()
.start()
.test_cmd()
.reset_ports();
}
fn probe(&mut self) -> Vec<usize> {
//设备枚举
let mut founded = Vec::new();
//此方法最终会返回这个Vec<usize>,其中存放了所有找到的已连接设备的slot id
{
let mut port_id_list = Vec::new();
let port_len = self.regs.port_register_set.len();
for i in 0..port_len {
let portsc = &self.regs.port_register_set.read_volatile_at(i).portsc;
info!(
"{TAG} Port {}: Enabled: {}, Connected: {}, Speed {}, Power {}",
i,
portsc.port_enabled_disabled(),
portsc.current_connect_status(),
portsc.port_speed(),
portsc.port_power()
);
if !portsc.port_enabled_disabled() {
continue;
}
port_id_list.push(i);
//初步检查物理port是否有产生供电信号-这标志着接口上有设备,这部分标志位的更新由xhci硬件实现
}
for port_idx in port_id_list {
//为所有已连接的设备做初始化,包括:
let port_id = port_idx + 1;
//↓
let slot_id = self.device_slot_assignment();
//向xhci申请slot id
self.dev_ctx.new_slot(slot_id as usize, 0, port_id, 32);
//为设备绑定slot
debug!("assign complete!");
//↓
self.address_device(slot_id, port_id);
//为设备分配地址
self.trace_dump_context(slot_id);
//↓
let packet_size0 = self.control_fetch_control_point_packet_size(slot_id);
trace!("packet_size0: {}", packet_size0);
//↓
self.set_ep0_packet_size(slot_id, packet_size0 as _);
//配置好控制端点
founded.push(slot_id)
}
}
founded
}
//以下则是对于不同的urb请求的具体实现,感兴趣的读者请自行查阅
fn control_transfer(
&mut self,
dev_slot_id: usize,
urb_req: ControlTransfer,
) -> crate::err::Result<UCB<O>> {
let direction = urb_req.request_type.direction.clone();
let buffer = urb_req.data;
let mut len = 0;
let data = if let Some((addr, length)) = buffer {
let mut data = transfer::DataStage::default();
len = length;
data.set_data_buffer_pointer(addr as u64)
.set_trb_transfer_length(len as _)
.set_direction(direction);
Some(data)
} else {
None
};
let setup = *transfer::SetupStage::default()
.set_request_type(urb_req.request_type.into())
.set_request(urb_req.request as u8)
.set_value(urb_req.value)
.set_index(urb_req.index)
.set_transfer_type({
if buffer.is_some() {
match direction {
Direction::In => TransferType::In,
Direction::Out => TransferType::Out,
}
} else {
TransferType::No
}
})
.set_length(len as u16);
trace!("{:#?}", setup);
let mut status = *transfer::StatusStage::default().set_interrupt_on_completion();
//=====post!=======
let mut trbs: Vec<transfer::Allowed> = Vec::new();
trbs.push(setup.into());
if let Some(data) = data {
trbs.push(data.into());
}
trbs.push(status.into());
let mut trb_pointers = Vec::new();
{
let ring = self.ep_ring_mut(dev_slot_id, 1);
for trb in trbs {
trb_pointers.push(ring.enque_transfer(trb));
}
}
if trb_pointers.len() == 2 {
trace!(
"[Transfer] >> setup@{:#X}, status@{:#X}",
trb_pointers[0],
trb_pointers[1]
);
} else {
trace!(
"[Transfer] >> setup@{:#X}, data@{:#X}, status@{:#X}",
trb_pointers[0],
trb_pointers[1],
trb_pointers[2]
);
}
fence(Ordering::Release);
self.regs.doorbell.update_volatile_at(dev_slot_id, |r| {
r.set_doorbell_target(1);
});
let complete = self
.event_busy_wait_transfer(*trb_pointers.last().unwrap() as _)
.unwrap();
match complete.completion_code() {
Ok(complete) => match complete {
CompletionCode::Success => Ok(UCB::new(CompleteCode::Event(
TransferEventCompleteCode::Success,
))),
err => panic!("{:?}", err),
},
Err(fail) => Ok(UCB::new(CompleteCode::Event(
TransferEventCompleteCode::Unknown(fail),
))),
}
}
fn configure_device(
&mut self,
dev_slot_id: usize,
urb_req: Configuration,
) -> crate::err::Result<UCB<O>> {
match urb_req {
Configuration::SetupDevice(config) => self.setup_device(dev_slot_id, &config),
Configuration::SwitchInterface(_, _) => todo!(),
}
}
fn device_slot_assignment(&mut self) -> usize {
// enable slot
let result = self
.post_cmd(command::Allowed::EnableSlot(
*command::EnableSlot::default().set_slot_type({
{
// TODO: PCI未初始化,读不出来
// let mut regs = self.regs.lock();
// match regs.supported_protocol(port) {
// Some(p) => p.header.read_volatile().protocol_slot_type(),
// None => {
// warn!(
// "{TAG} Failed to find supported protocol information for port {}",
// port
// );
// 0
// }
// }
0
}
}),
))
.unwrap();
let slot_id = result.slot_id();
trace!("assigned slot id: {slot_id}");
slot_id as usize
}
fn address_device(&mut self, slot_id: usize, port_id: usize) {
let port_idx = port_id - 1;
let port_speed = self.get_speed(port_idx);
let max_packet_size = self.parse_default_max_packet_size_from_port(port_idx);
let dci = 1;
let transfer_ring_0_addr = self.ep_ring_mut(slot_id, dci).register();
let ring_cycle_bit = self.ep_ring_mut(slot_id, dci).cycle;
let context_addr = {
let context_mut = self
.dev_ctx
.device_input_context_list
.get_mut(slot_id)
.unwrap()
.deref_mut();
let control_context = context_mut.control_mut();
control_context.set_add_context_flag(0);
control_context.set_add_context_flag(1);
for i in 2..32 {
control_context.clear_drop_context_flag(i);
}
let slot_context = context_mut.device_mut().slot_mut();
slot_context.clear_multi_tt();
slot_context.clear_hub();
slot_context.set_route_string(Self::append_port_to_route_string(0, port_id)); // for now, not support more hub ,so hardcode as 0.//TODO: generate route string
slot_context.set_context_entries(1);
slot_context.set_max_exit_latency(0);
slot_context.set_root_hub_port_number(port_id as _); //todo: to use port number
slot_context.set_number_of_ports(0);
slot_context.set_parent_hub_slot_id(0);
slot_context.set_tt_think_time(0);
slot_context.set_interrupter_target(0);
slot_context.set_speed(port_speed);
let endpoint_0 = context_mut.device_mut().endpoint_mut(dci as _);
endpoint_0.set_endpoint_type(xhci::context::EndpointType::Control);
endpoint_0.set_max_packet_size(max_packet_size);
endpoint_0.set_max_burst_size(0);
endpoint_0.set_error_count(3);
endpoint_0.set_tr_dequeue_pointer(transfer_ring_0_addr);
if ring_cycle_bit {
endpoint_0.set_dequeue_cycle_state();
} else {
endpoint_0.clear_dequeue_cycle_state();
}
endpoint_0.set_interval(0);
endpoint_0.set_max_primary_streams(0);
endpoint_0.set_mult(0);
endpoint_0.set_error_count(3);
(context_mut as *const Input<16>).addr() as u64
};
fence(Ordering::Release);
let result = self
.post_cmd(command::Allowed::AddressDevice(
*command::AddressDevice::new()
.set_slot_id(slot_id as _)
.set_input_context_pointer(context_addr),
))
.unwrap();
trace!("address slot [{}] ok", slot_id);
}
fn control_fetch_control_point_packet_size(&mut self, slot_id: usize) -> u8 {
trace!("control_fetch_control_point_packet_size");
let mut buffer = DMA::new_vec(0u8, 8, 64, self.config.lock().os.dma_alloc());
self.control_transfer(
slot_id,
ControlTransfer {
request_type: bmRequestType::new(
Direction::In,
DataTransferType::Standard,
trasnfer::control::Recipient::Device,
),
request: bRequest::GetDescriptor,
index: 0,
value: DescriptorType::Device.forLowBit(0).bits(),
data: Some((buffer.addr() as usize, buffer.length_for_bytes())),
},
)
.unwrap();
let mut data = [0u8; 8];
data[..8].copy_from_slice(&buffer);
trace!("got {:?}", data);
data.last()
.and_then(|len| Some(if *len == 0 { 8u8 } else { *len }))
.unwrap()
}
fn set_ep0_packet_size(&mut self, dev_slot_id: usize, max_packet_size: u16) {
let addr = {
let input = self.dev_ctx.device_input_context_list[dev_slot_id as usize].deref_mut();
input
.device_mut()
.endpoint_mut(1) //dci=1: endpoint 0
.set_max_packet_size(max_packet_size);
debug!(
"CMD: evaluating context for set endpoint0 packet size {}",
max_packet_size
);
(input as *mut Input<16>).addr() as u64
};
self.post_cmd(command::Allowed::EvaluateContext(
*command::EvaluateContext::default()
.set_slot_id(dev_slot_id as _)
.set_input_context_pointer(addr),
))
.unwrap();
}
fn interrupt_transfer(
&mut self,
dev_slot_id: usize,
urb_req: trasnfer::interrupt::InterruptTransfer,
) -> crate::err::Result<UCB<O>> {
let (addr, len) = urb_req.buffer_addr_len;
self.ep_ring_mut(dev_slot_id, urb_req.endpoint_id as _)
.enque_transfer(transfer::Allowed::Normal(
*Normal::new()
.set_data_buffer_pointer(addr as _)
.set_trb_transfer_length(len as _)
.set_interrupter_target(0)
.set_interrupt_on_short_packet()
.set_interrupt_on_completion(),
));
self.regs.doorbell.update_volatile_at(dev_slot_id, |r| {
r.set_doorbell_target(urb_req.endpoint_id as _);
});
let transfer_event = self.event_busy_wait_transfer(addr as _).unwrap();
match transfer_event.completion_code() {
Ok(complete) => match complete {
CompletionCode::Success | CompletionCode::ShortPacket => {
trace!("ok! return a success ucb!");
Ok(UCB::new(CompleteCode::Event(
TransferEventCompleteCode::Success,
)))
}
err => panic!("{:?}", err),
},
Err(fail) => Ok(UCB::new(CompleteCode::Event(
TransferEventCompleteCode::Unknown(fail),
))),
}
}
fn extra_step(&mut self, dev_slot_id: usize, urb_req: ExtraStep) -> crate::err::Result<UCB<O>> {
match urb_req {
ExtraStep::PrepareForTransfer(dci) => {
if dci > 1 {
self.prepare_transfer_normal(dev_slot_id, dci as u8);
Ok(UCB::<O>::new(CompleteCode::Event(
TransferEventCompleteCode::Success,
)))
} else {
Err(Error::DontDoThatOnControlPipe)
}
}
}
}
}事件系统
想必读者也已经注意到了,在我们的代码中,驱动成为了一个子系统,USB设备本身作为一个状态机,其驱动其与操作系统之间并没有太多直接的系统调用相关的关系(当然,也有例外),这带来了安全性/可移植性等诸多好处。但这也引申出了一个问题:驱动虽然能独立运行,但是要如何将需要让操作系统知道的消息告诉操作系统? 于是,我们就在USB子系统中增加了事件系统的概念:

在这里,USB系统内部的所谓“事件总线”,事实上仅仅是一个发送事件的接口而已,其并没有设置缓冲区(缓冲区太多有时候反而会增加延迟,我们需要做出取舍),而仅仅是接受特定格式的事件结构体,并按照OS抽象层实现的逻辑来处理他们。
接下来,同样的,让我们跟踪HID驱动所发出的事件:
fn receive_complete_event(&mut self, ucb: UCB<O>) {
match ucb.code {
CompleteCode::Event(TransferEventCompleteCode::Success) => {
trace!("completed!");
self.receiption_buffer
.as_ref()
.map(|a| a.lock().to_vec().clone())
.inspect(|a| {
trace!("current buffer:{:?}", a);
//注意这里产生了变化
if a.iter().any(|v| *v != 0) {
self.config
.lock()
.os
.send_event(temp_mouse_report_parser::parse(a))
}
});
self.driver_state_machine = HidMouseStateMachine::Sending
}
CompleteCode::Event(TransferEventCompleteCode::Babble) => {
self.driver_state_machine = HidMouseStateMachine::Sending
}
other => panic!("received {:?}", other),
}
}在这里,我们先将鼠标的报文解析成特定的格式,然后将其发送至事件总线上:
use alloc::vec::Vec;
use bit_field::BitField;
use log::{debug, trace};
use crate::abstractions::event::{MouseEvent, USBSystemEvent};
pub fn parse(buf: &Vec<u8>) -> USBSystemEvent {
let left = buf[1].get_bit(0);
let right = buf[1].get_bit(1);
let middle = buf[1].get_bit(2);
let dx = i16::from_ne_bytes(unsafe { buf[3..=4].try_into().unwrap() });
let dy = i16::from_ne_bytes(unsafe { buf[5..=6].try_into().unwrap() });
let wheel = buf[7] as i8;
let mouse_event = MouseEvent {
dx: dx as _,
dy: dy as _,
left,
right,
middle,
wheel: wheel as _,
};
trace!("decoded:{:#?}", mouse_event);
USBSystemEvent::MouseEvent(mouse_event)
}于是一个事件就这么被发送到了系统抽象层所定义的接收方法中,接下来就是OS相关的工作了。
对于Arceos,我们也使用了事件系统,其位于ax_event_bus这个crate中:
#![no_std]
#![feature(allocator_api)]
use alloc::{collections::btree_map::BTreeMap, sync::Arc, vec, vec::Vec};
use events::{mouse::MouseEvent, EventData, EventHandler, Events};
use lazy_static::lazy_static;
use spinlock::SpinNoIrq;
extern crate alloc;
pub mod events;
lazy_static! {
static ref EVENT_BUS: SpinNoIrq<EventBus> = SpinNoIrq::new(EventBus::new());
}
struct EventBus {
bus: BTreeMap<Events, Vec<Arc<dyn EventHandler>>>,
}
impl EventBus {
fn new() -> Self {
Self {
bus: BTreeMap::new(),
}
}
}
pub fn post_event(event: Events, mut data: EventData) -> bool {
EVENT_BUS
.lock()
.bus
.get(&event)
.map(|handlers| !handlers.iter().any(|handler| !handler.handle(&mut data)))
.unwrap_or(false)
}
pub fn register_handler(event: Events, handler: &Arc<dyn EventHandler>) {
EVENT_BUS
.lock()
.bus
.entry(event)
.and_modify(|v| v.push(handler.clone()))
.or_insert(vec![handler.clone()]);
}对于arceos的事件系统,主要关注这里即可,剩下的无非是一些结构体与事件的定义。这里暴露出了两个方法:
-
register_handler:用于注册事件处理器(event handler)
- 事件处理器与事件的定义如下,这里的MouseEvent并不是USB系统中的同名结构体
//... pub enum EventData { MouseEvent(MouseEvent), }
[derive(PartialEq, Eq, PartialOrd, Ord)]
pub enum Events { MouseEvent, }
pub trait EventHandler: Send + Sync { fn handle(&self, event: &mut EventData) -> bool; }
- 事件处理器与事件的定义如下,这里的MouseEvent并不是USB系统中的同名结构体
- post_event:用于接受事件,并发布到对应的事件总线上-将会逐个调用注册的驱动处理程序,若某一个驱动处理程序返回false,则过程将提前结束
接下来,让我们看看将这一切关联起来的部分:
apps/boards/phytium-car/src/main.rs
//...
#[derive(Clone)]
struct PlatformAbstraction;
impl driver_usb::abstractions::OSAbstractions for PlatformAbstraction {
type VirtAddr = VirtAddr;
type DMA = GlobalNoCacheAllocator;
const PAGE_SIZE: usize = PageSize::Size4K as usize;
fn dma_alloc(&self) -> Self::DMA {
axalloc::global_no_cache_allocator()
}
fn send_event(&self, event: USBSystemEvent) {
match event {
USBSystemEvent::MouseEvent(driver_usb::abstractions::event::MouseEvent {
dx,
dy,
left,
right,
middle,
wheel,
}) => {
ax_event_bus::post_event(
Events::MouseEvent,
EventData::MouseEvent(MouseEvent {
dx,
dy,
left,
right,
middle,
wheel,
}),
);
}
};
}
}
impl driver_usb::abstractions::HALAbstractions for PlatformAbstraction {
fn force_sync_cache() {}
}
struct MouseEventHandler;
impl EventHandler for MouseEventHandler {
fn handle(&self, event: &mut ax_event_bus::events::EventData) -> bool {
if let EventData::MouseEvent(data) = event {
let mut flag = false;
println!("{:?}", data);
match (&data.dx, &data.dy, &data.left) {
(x, y, _) if (-10..=10).contains(x) && (-10..=10).contains(y) => {
car_run_task(Quest::Stop)
}
(x, y, _) if y.abs() > x.abs() => {
// car_run_task(if *y < 0 { Quest::Advance } else { Quest::Back });
if *y < 0 {
car_run_task(Quest::Advance)
} else {
car_run_task(Quest::Back)
};
}
(x, y, false) if x.abs() > y.abs() => {
// car_run_task(
if *x > 0 {
car_run_task(Quest::RotateLeft)
} else {
// Quest::RotateLeft
car_run_task(Quest::RotateRight)
}
// );
}
(x, y, true) if x.abs() > 10 && y.abs() > 10 => {
if *x > 0 {
if *y > 0 {
car_run_task(Quest::BackRight)
} else {
car_run_task(Quest::AdvanceRight)
}
} else {
if *y > 0 {
car_run_task(Quest::BackLeft)
} else {
car_run_task(Quest::AdvanceLeft)
}
}
}
_ => {}
}
return true;
}
false
}
}
#[no_mangle]
fn main() {
let mut usbsystem = driver_usb::USBSystem::new({
USBSystemConfig::new(0xffff_0000_31a0_8000, 48, 0, PlatformAbstraction)
})
.init()
.init_probe();
println!("usb initialized");
driver_pca9685::pca_init(2500, 2500, 2500, 2500);
println!("i2c init completed");
let handler: Arc<dyn EventHandler> = Arc::new(MouseEventHandler);
ax_event_bus::register_handler(Events::MouseEvent, &handler);
println!("handler registered");
usbsystem.drive_all();
}- 在这里,我们定义了平台无关抽象层的实例,并为其实现了相应的trait(包括USB系统的事件到arceos事件的转换)
- 同样的,我们还定义了一个驱动事件处理程序-该处理程序接受鼠标事件,并会控制小车行走.
- 在main方法中,首先初始化了usb系统,而后初始化了小车电机驱动板的驱动,而后是将我们定义的event handler注册进了事件总线中
- 最终,usb系统开始运行,整个系统就开始响应事件并工作了