treadscan
![]()
This package provides utilities for extracting tire tread (pattern) from images, or even from video of passing vehicles.
Three main classes are
treadscan.Detector - picks out stopped vehicles from continoous footage (like at an intersection, under a traffic light).
treadscan.Segmentor - finds tires in an image, represented by an ellipse (using basic image processing methods) or keypoints (using a Keypoint-RCNN model).
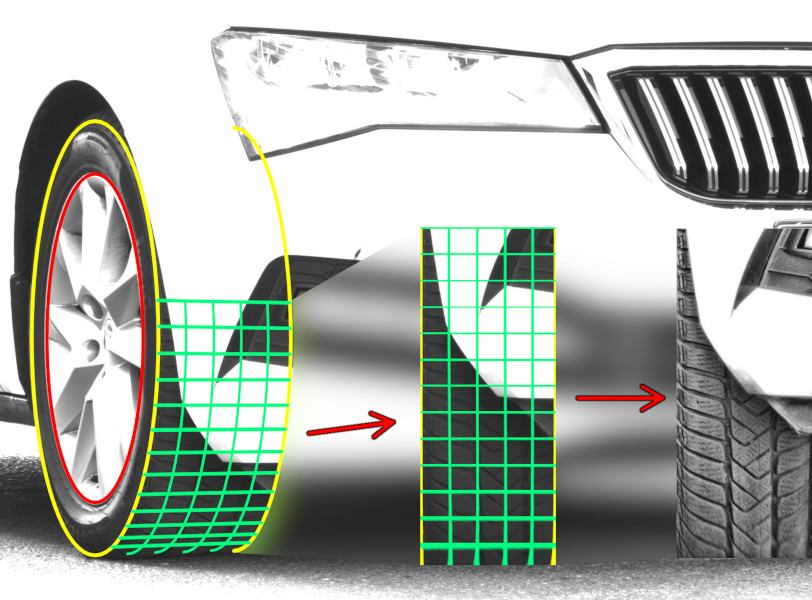
treadscan.TireModel - creates a tire model from keypoints (or an ellipse), then "unwraps" the tire tread.
There is a pre-trained Keypoint-RCNN model for detecting tire keypoints available in this repository, or you can train your own. Before training a model, you need annotated training data. To annotate images, you can use the model_annotation.py, which conveniently saves the keypoints and bounding boxes as a JSON in the same format as used in the training notebook. This script is included in this folder.
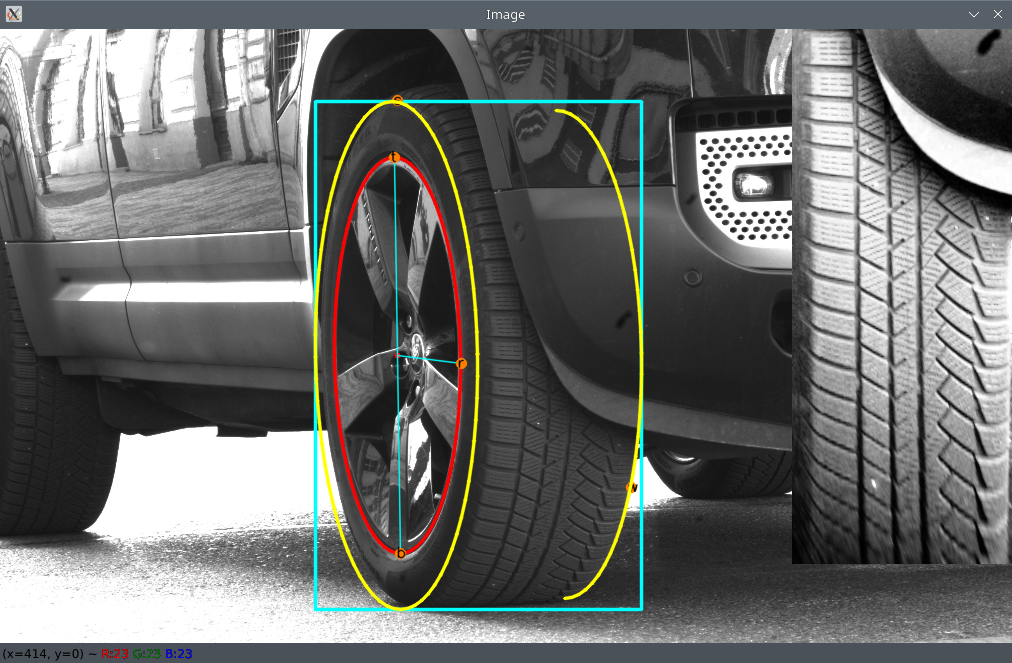
This GUI utilises the OpenCV window, using mouse position and keyboard input to place the points. So to place a point, user can hover over a location and press a specific key, or hold the key while dragging with the mouse. The points which have to be placed manually are:
T- top of vehicle's rimB- bottom of vehicle's rimR- third point on the rim (best to always use the same location)S- sidewall height (recommended location is above theTpoint)W- inner side of tire
Other controls are:
SPACEBAR- show a preview of tire treadBACKSPACE- hide tread previewN- submit keypoints, keep annotating (you might wish to annotate ALL tires in image if there are multiple)ENTER- to export keypoints to JSON fileESCAPE- quit annotation without exporting
The 5 keypoints are used to construct a tire model, defined by outer and inner ellipses.
Example usage
import cv2
import treadscan
# Grayscale picture of background
background_sample = cv2.imread('background.png', cv2.IMREAD_GRAYSCALE)
# BackgroundSubtractorSimple can be substituted with any cv2 background subtractor, for example cv2.BackgroundSubtractorKNN
background_subtractor = treadscan.BackgroundSubtractorSimple(background_sample)
# Pre-recorded video, could also be a live stream from the camera
frame_extractor = treadscan.FrameExtractor('recording.mp4', treadscan.InputType.VIDEO)
# Detects stopped vehicles from footage
detector = treadscan.Detector(backsub=background_subtractor, frame_extractor=frame_extractor)
# Keypoint-RCNN finds five keypoints per tire in image
segmentor = treadscan.SegmentorRCNN('RCNN_model/saved_model.pth')
i = 1
# For each stopped vehicle from footage:
for image in detector.detect():
# Save detected vehicle
cv2.imwrite(f'image{i:04d}.jpg', image)
# Find all tires in image
list_of_keypoints = segmentor.find_keypoints(image)
# For each tire in image:
for j in range(len(list_of_keypoints)):
keypoints = list_of_keypoints[j]
# Construct tire model
tire_model = treadscan.TireModel(image.shape)
tire_model.from_keypoints(*keypoints)
# Unwrap tire tread from the model
tread = tire_model.unwrap(image)
# Tread postprocessing
tread = treadscan.remove_gradient(tread)
tread = treadscan.clahe(tread)
# Save unwrapped tread
cv2.imwrite(f'image{i:04d}_tread{j+1:02d}.jpg', tread)
i += 1