App Description
- Robot controller is a remote control for UDP enabled electronics, sending packets over WiFi.
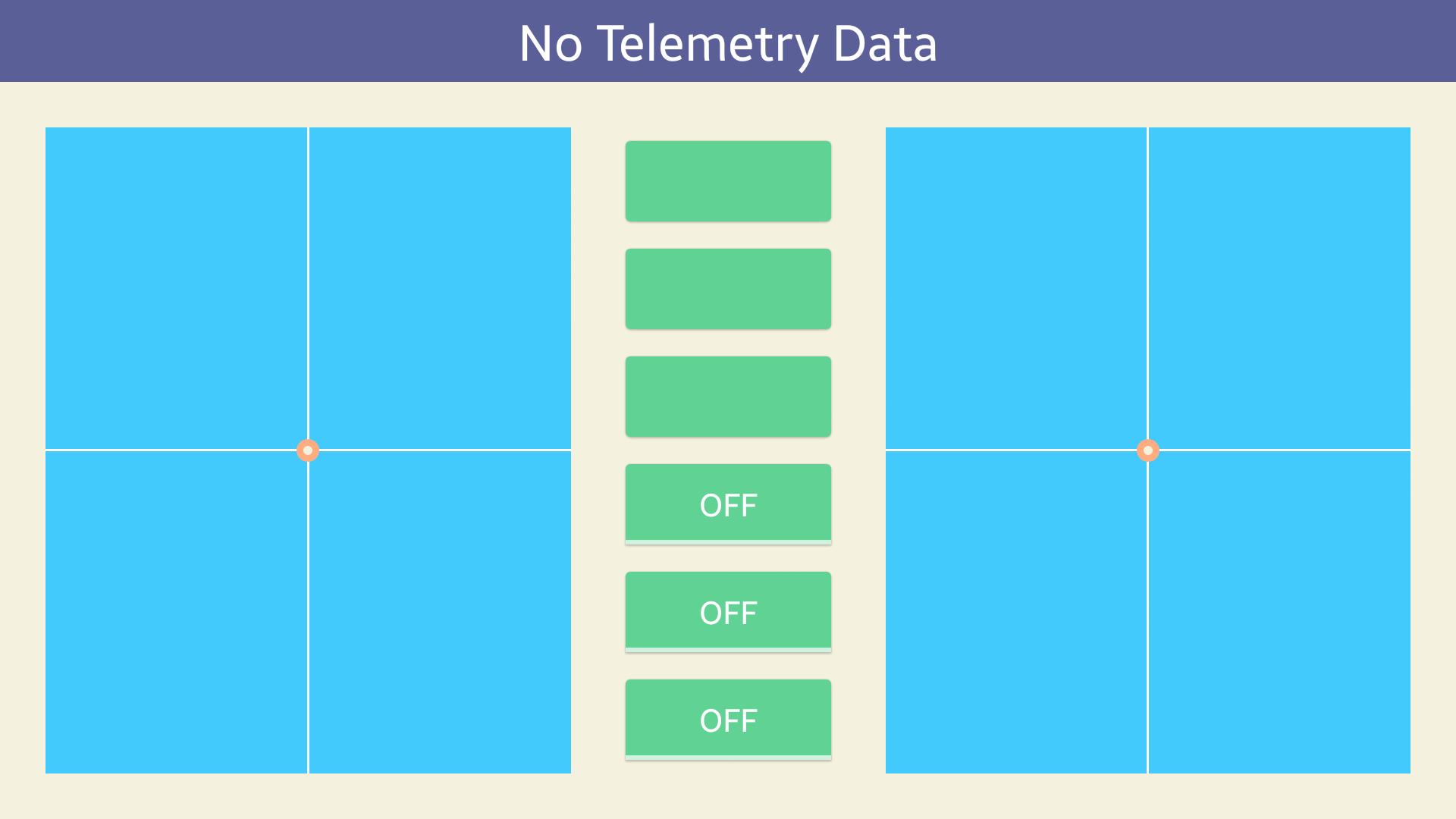
- There are two joysticks, three normal buttons, and three toggle buttons.
- The address and port to send to can be configured. The rate at which to send packets can also be configured.
- This app also supports telemetry! Any UDP packets sent to this device’s address and specified port will be displayed above the controller.
- Packets are in the form of the text representation of a dictionary. See the help screen for more info.
- This app has been tested with a Raspberry Pi as a receiver, but it should work with other UDP-enabled devices, such as a WiFi enabled Arduino or an ESP8266.
Packets
An example packet: {'btn6':0, 'btn1':0, 'rightTouchPadX':-10, 'btn5':0, 'rightTouchPadY':-17, 'btn2':0, 'leftTouchPadY':-89, 'btn4':0, 'btn3':0, 'leftTouchPadX':-9}.
The touchpad values range from -100 to 100, while the button values range from 0 to 1. "btn1" is the top button and "btn6" is the bottom button.
In Python, the received message can simply be evaluated to a dict with ast.literal_eval(message.decode()). See the below for actual code.
Usage
See the Examples folder. ReceiverTesting.py is an example of how to receive the UDP packets. TelemetryTesting.py is an example of how to send telemetry back to the controller. Simply run cd Examples and python ReceiverTesting.py or python TelemetryTesting.py — there is a dialog that asks for ports and addresses.