Drone-visual-servoing-with-a-controller-in-MATLAB
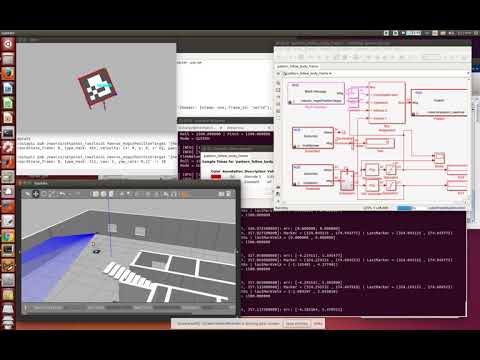
A ROS package to control a copter so that it follows ArUco patterns with the bottom camera. When using in Loiter mode, the system uses a controller in ROS. When the drone is in Guided mode, the system is connected to a controller in MATLAB/Simulink.
Video demo
To do list
- Test FOPD controller;
- Add a PID controller to make a close loop;
- Send data to Terminal and copy them to text file;
- Add FOPD controller and log data;
- Plot curve to compare the captured data.
Setup steps:
Please read this page: https://github.com/cnpcshangbo/Drone-visual-servoing-with-a-controller-in-MATLAB/wiki/Setting-up
Start the simulation
Please read this page: https://github.com/cnpcshangbo/Drone-visual-servoing-with-a-controller-in-MATLAB/wiki/Start-the-simulation
Support forums and chats
Please ask your questions not related to bugs/feauture requests on:
References:
-
YouTube video for Simulating the package
