 mlyle
commented
8 years ago
mlyle
commented
8 years ago @jhitesma and @dustin have both seen various sparky1 anomalies
- This
- Freeze on attempt to arm
- On landing/disarm, a reset
I don't know why sparky1 would be different, and there's other possible explanations for each of these, but the evidence of badness is adding up.
 jhitesma
jhitesma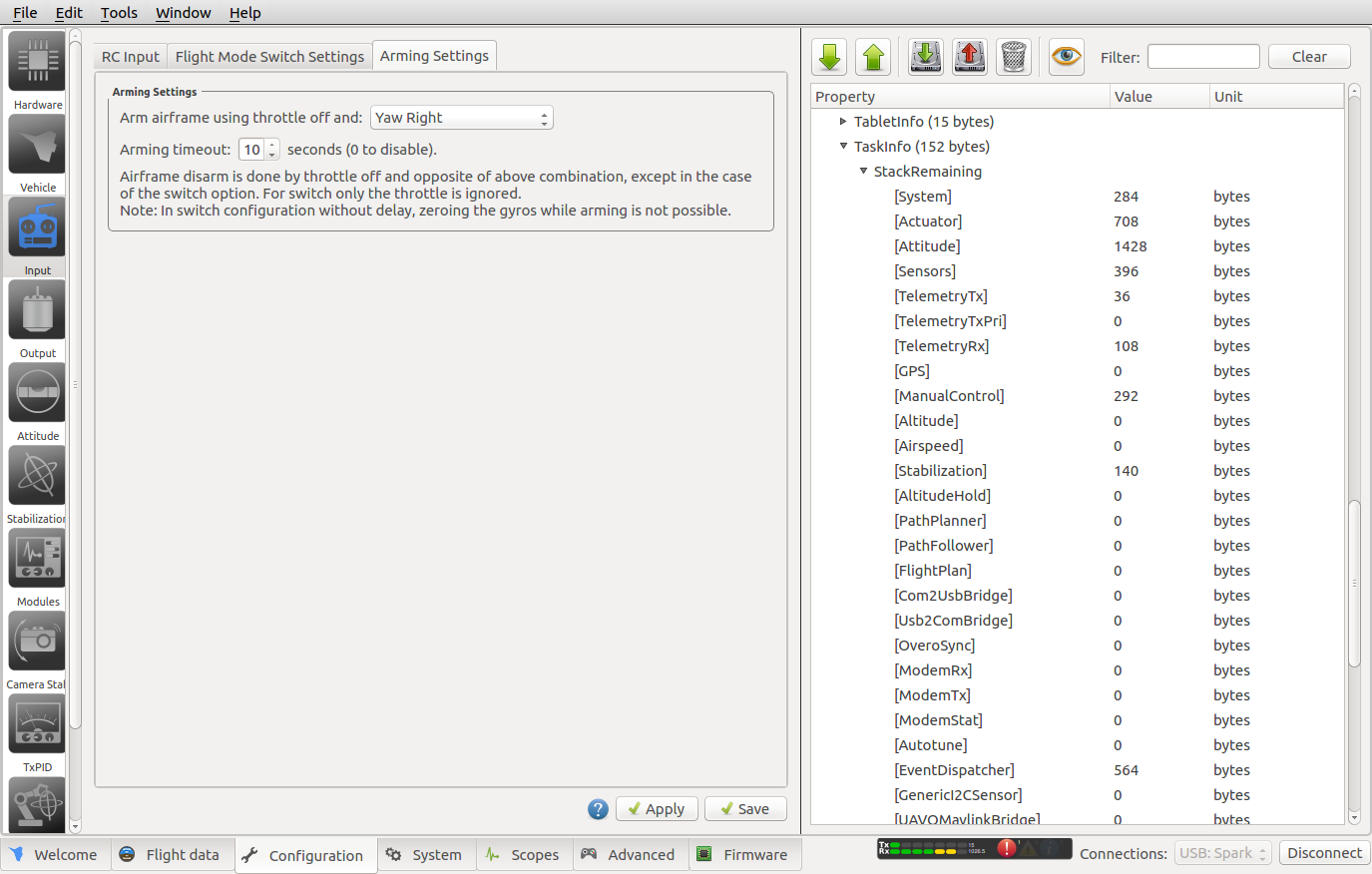
 jihlein
jihlein tracernz
tracernz mluessi
mluessi pug398
pug398
Using recent builds of next I'm getting reboots on my sparky board when setting up inputs with a PPM RX.
I've tried two different RX's (though admittedly both homemade FlySky RX's so I'm not 100% sure there's not a hardware issue going on.) and tried powering the RX both through the sparky and directly off the BEC.
Either way my board is rebooting near the end of the inputs wizard (between the center the sticks step to just after the confirm failsafe step) or if I try manual setup it's rebooting almost as soon as I try to change anything.