SwitchBot-MQTT-BLE-ESP32
Switchbot local control using ESP32. no switchbot hub used/required. works with any smarthub that supports MQTT
https://github.com/devWaves/SwitchBot-MQTT-BLE-ESP32
v7.1
Created: on Aug 17 2022
Author: devWaves

Contributions from:
- HardcoreWR
- vin-w
Code can be installed using Arduino IDE OR using Visual Studio Code PlatformIO
- For Arduino IDE - Use only the SwitchBot-BLE2MQTT-ESP32.ino file
- For Visual Studio Code PlatformIO - Use the src/SwitchBot-BLE2MQTT-ESP32.cpp and platformio.ini files
Allows for "unlimited" switchbots devices to be controlled via MQTT sent to ESP32. ESP32 will send BLE commands to switchbots and return MQTT responses to the broker
- I do not know where performance will be affected by number of devices
- This is an unofficial SwitchBot integration. User takes full responsibility with the use of this code**
based off of the work from https://github.com/combatistor/ESP32_BLE_Gateway
Notes:
- Supports Home Assistant MQTT Discovery
- Support bots, curtains, temp meters, contact sensors, motion sensors, plug mini
- It works for button press/on/off
- It works for curtain open/close/pause/position(%)
- It can request status values (bots/curtain/meter/motion/contact: battery, mode, state, position, temp etc) using a "rescan" for all devices
- It can request individual device status values (bots/curtain/meter/motion/contact: battery, mode, state, position, temp etc) using a "requestInfo"
- Good for placing one ESP32 in a zone with 1 or 2 devices that has a bad bluetooth signal from your smart hub. MQTT will use Wifi to "boost" the bluetooth signal
- ESP32 bluetooth is pretty strong and one ESP32 can work for entire house. The code will try around 60 times to connect/push button. It should not need this many but it depends on ESP32 bluetooth signal to switchbots. If one alone doesn't work, get another esp32 and place it in the problem area
- OTA update added. Go to ESP32 IP address in browser. In Arduino IDE menu - Sketch / Export compile Binary . Upload the .bin file
- Support for bot passwords
- Automatically rescan every X seconds
- Automatically requestInfo X seconds after successful control command
- Retry set/control command on busy response from bot/curtain until success
- Get settings from bot (firmware, holdSecs, inverted, number of timers)
- Add a defined delay between each set/control commands or per device
- ESP32 will collect hold time from bots and automatically wait holdSecs+defaultBotWaitTime until next command is sent to bot
- Retry on no response curtain or bot
- holdPress = set bot hold value, then call press (without disconnecting in between)
- Set/Control is prioritized over scanning. While scanning, if a set/control command is received scanning is stopped and resumed later
- ESP32 can simulate ON/OFF for devices when bot is in PRESS mode. (Cannot guarantee it will always be accurate)
- Curtain position will update as curtain is moving
- Switchbot device states will always update when state is changed while scanning (active/passive)
- Mesh multiple ESP32s for better motion/contact/meter performance
- Active scanning (uses more battery) VS Passive scanning (uses less battery)
\<ESPMQTTTopic> = \<mqtt_main_topic>/\<host>
- Default = switchbot/esp32ESP32 will subscribe to MQTT 'set' topic for every configure device
- <ESPMQTTTopic>/bot/<name>/set
- <ESPMQTTTopic>/curtain/<name>/set
- <ESPMQTTTopic>/meter/<name>/set
- <ESPMQTTTopic>/contact/<name>/set
- <ESPMQTTTopic>/motion/<name>/set
Send a payload to the 'set' topic of the device you want to control
Strings:
- "PRESS"
- "ON"
- "OFF"
- "OPEN"
- "CLOSE"
- "PAUSE"
- "STATEOFF" (Only for bots in simulated ON/OFF mode)
- "STATEON" (Only for bots in simulated ON/OFF mode)
Integer 0-100 (for curtain position) Example: 50
Integer 0-100 (for setting bot hold seconds) Example: 5 (for bot only) Does the same thing as <ESPMQTTTopic>/setHold
Strings:
- "REQUESTINFO" or "GETINFO" (for bot and curtain) Does the same thing as calling <ESPMQTTTopic>/requestInfo
- "REQUESTSETTINGS" or "GETSETTINGS" (for bot only) Does the same thing as calling <ESPMQTTTopic>/requestSettings . requires getBotResponse = true
- "MODEPRESS","MODESWITCH","MODEPRESSINV","MODESWITCHINV" (for bot only) Does the same thing as <ESPMQTTTopic>/setMode
ESP32 will respond with MQTT on 'status' topic for every configured device
- <ESPMQTTTopic>/bot/<name>/status
- <ESPMQTTTopic>/curtain/<name>/status
- <ESPMQTTTopic>/meter/<name>/status
Example payload:
- {"status":"connected", "command":"ON"}
- {"status":"errorConnect", "command":"ON"}
- {"status":"errorCommand", "command":"NOTVALID"}
- {"status":"commandSent", "command":"ON"}
- {"status":"busy", "value":3, "command":"ON"}
- {"status":"failed", "value":9, "command":"ON"}
- {"status":"success", "value":1, "command":"ON"}
- {"status":"success", "value":5, "command":"PRESS"}
- {"status":"success", "command":"REQUESTINFO"}
ESP32 will respond with MQTT on 'state' topic for every configured device
- <ESPMQTTTopic>/bot/<name>/state
- <ESPMQTTTopic>/curtain/<name>/state
Example payload:
- "ON"
- "OFF"
- "OPEN"
- "CLOSE"
ESP32 will respond with MQTT on 'position' topic for every configured device
- <ESPMQTTTopic>/curtain/<name>/position
Example payload:
- {"pos":0}
- {"pos":100}
- {"pos":50}ESP32 will Subscribe to MQTT topic to rescan for all device information
- <ESPMQTTTopic>/rescan
send a JSON payload of how many seconds you want to rescan for
example payloads =
{"sec":30}
{"sec":"30"}ESP32 will Subscribe to MQTT topic for device information
- <ESPMQTTTopic>/requestInfo
send a JSON payload of the device you want to control
example payloads =
{"id":"switchbotone"}
ESP32 will respond with MQTT on
- <ESPMQTTTopic>/#
Example attribute responses per device are detected:
- <ESPMQTTTopic>/bot/<name>/attributes
- <ESPMQTTTopic>/curtain/<name>/attributes
- <ESPMQTTTopic>/meter/<name>/attributes
- <ESPMQTTTopic>/contact/<name>/attributes
- <ESPMQTTTopic>/motion/<name>/attributes
Example payloads:
- {"rssi":-78,"mode":"Press","state":"OFF","batt":94}
- {"rssi":-66,"calib":true,"batt":55,"pos":50,"state":"open","light":1}
- {"rssi":-66,"scale":"c","batt":55,"C":"21.5","F":"70.7","hum":"65"}
- {"rssi":-77,"batt":89,"motion":"NO MOTION","led":"OFF","sensedistance":"LONG","light":"DARK"}
- {"rssi":-76,"batt":91,"motion":"NO MOTION","contact":"CLOSED","light":"DARK","incount":1,"outcount":3,"buttoncount":4}
Example attribute responses per device are detected:
- <ESPMQTTTopic>/bot/<name>/state
- <ESPMQTTTopic>/curtain/<name>/state
- <ESPMQTTTopic>/meter/<name>/state
Example payload:
- "ON"
- "OFF"
- "OPEN"
- "CLOSE"
ESP32 will respond with MQTT on 'position' topic for every configured device
- <ESPMQTTTopic>/curtain/<name>/position
Example payload:
- {"pos":0}
- {"pos":100}
- {"pos":50}
Example topic responses specific to motion/contact sensors:
- <ESPMQTTTopic>/motion/<name>/motion Example response payload: "MOTION", "NO MOTION"
- <ESPMQTTTopic>/motion/<name>/illuminance Example response payload: "LIGHT", "DARK"
- <ESPMQTTTopic>/contact/<name>/contact Example response payload: "OPEN", "CLOSED"
- <ESPMQTTTopic>/contact/<name>/motion Example response payload: "MOTION", "NO MOTION"
- <ESPMQTTTopic>/contact/<name>/illuminance Example response payload: "LIGHT", "DARK"
- <ESPMQTTTopic>/contact/<name>/in Example response payload: "IDLE", "ENTERED"
- <ESPMQTTTopic>/contact/<name>/out Example response payload: "IDLE", "EXITED"
- <ESPMQTTTopic>/contact/<name>/button Example response payload: "IDLE", "PUSHED"
Note: You can use the button on the contact sensor to trigger other non-switchbot devices from your smarthub
When <ESPMQTTTopic>/contact/<name>/button = "PUSHED"ESP32 will Subscribe to MQTT topic for device settings information (requires getBotResponse = true) - BOT ONLY
- <ESPMQTTTopic>/requestSettings
send a JSON payload of the device you want to control
example payloads =
{"id":"switchbotone"}
ESP32 will respond with MQTT on
- <ESPMQTTTopic>/#
Example responses per device are detected:
- <ESPMQTTTopic>/bot/<name>/settings
Example payloads:
- {"firmware":4.9,"timers":0,"inverted":false,"hold":5}ESP32 will Subscribe to MQTT topic setting hold time on bots
- <ESPMQTTTopic>/setHold
send a JSON payload of the device you want to control
example payloads =
{"id":"switchbotone", "hold":5}
{"id":"switchbotone", "hold":"5"}
ESP32 will respond with MQTT on
- <ESPMQTTTopic>/#
ESP32 will respond with MQTT on 'status' topic for every configured device
- <ESPMQTTTopic>/bot/<name>/status
Example reponses:
- <ESPMQTTTopic>/bot/<name>/status
Example payload:
- {"status":"connected", "command":"5"}
- {"status":"errorConnect", "command":"5"}
- {"status":"errorCommand", "command":"NOTVALID"}
- {"status":"commandSent", "command":"5"}
- {"status":"busy", "value":3, "command":"5"}
- {"status":"failed", "value":9, "command":"5"}
- {"status":"success", "value":1, "command":"5"}
- {"status":"success", "value":5, "command":"5"}
- {"status":"success", "command":"REQUESTSETTINGS"}ESP32 will Subscribe to MQTT topic to holdPress on bots. holdPress = set bot hold value, then call press on bot without disconnecting in between
- <ESPMQTTTopic>/holdPress
send a JSON payload of the device you want to control
example payloads =
{"id":"switchbotone", "hold":5}
{"id":"switchbotone", "hold":"5"}
ESP32 will respond with MQTT on
- <ESPMQTTTopic>/#
ESP32 will respond with MQTT on 'status' topic for every configured device
- <ESPMQTTTopic>/bot/<name>/status
Example reponses:
- <ESPMQTTTopic>/bot/<name>/status
Example payload:
- {"status":"connected", "command":"5"}
- {"status":"errorConnect", "command":"5"}
- {"status":"errorCommand", "command":"NOTVALID"}
- {"status":"commandSent", "command":"5"}
- {"status":"busy", "value":3, "command":"5"}
- {"status":"failed", "value":9, "command":"5"}
- {"status":"success", "value":1, "command":"5"}
- {"status":"success", "value":5, "command":"5"}
- {"status":"success", "command":"REQUESTSETTINGS"}
- {"status":"connected", "command":"PRESS"}
- {"status":"errorConnect", "command":"PRESS"}
- {"status":"commandSent", "command":"PRESS"}
- {"status":"busy", "value":3, "command":"PRESS"}
- {"status":"failed", "value":9, "command":"PRESS"}
- {"status":"success", "value":1, "command":"PRESS"}
- {"status":"success", "value":5, "command":"PRESS"}ESP32 will Subscribe to MQTT topic setting mode for bots
- <ESPMQTTTopic>/setMode
send a JSON payload of the device you want to control
example payloads =
{"id":"switchbotone", "mode":"MODEPRESS"}
{"id":"switchbotone", "mode":"MODESWITCH"}
{"id":"switchbotone", "mode":"MODEPRESSINV"}
{"id":"switchbotone", "mode":"MODESWITCHINV"}
ESP32 will respond with MQTT on 'status' topic for every configured device
- <ESPMQTTTopic>/bot/<name>/status
Example reponses:
- <ESPMQTTTopic>/bot/<name>/status
Example payload:
- {"status":"connected", "command":"MODEPRESS"}
- {"status":"errorConnect", "command":"MODEPRESS"}
- {"status":"errorCommand", "command":"NOTVALID"}
- {"status":"commandSent", "command":"MODEPRESS"}
- {"status":"busy", "value":3, "command":"MODEPRESS"}
- {"status":"failed", "value":9, "command":"MODEPRESS"}
- {"status":"success", "value":1, "command":"MODEPRESS"}
- {"status":"success", "value":5, "command":"MODEPRESS"}ESP32 will respond with MQTT on ESPMQTTTopic with ESP32 status
- <ESPMQTTTopic>
example payloads:
{status":"idle"}
{status":"scanning"}
{status":"boot"}
{status":"controlling"}
{status":"getsettings"}Errors that cannot be linked to a specific device will be published to
- <ESPMQTTTopic>
Steps to Install on ESP32 - Using Arduino IDE
- Install Arduino IDE
- Setup IDE for proper ESP32 type https://randomnerdtutorials.com/installing-the-esp32-board-in-arduino-ide-windows-instructions/ (Tested working with version 1.0.6 of the ESP32 Core Arduino Library)
- Install NimBLE-Arduino library (Tested working with version 1.4.0)
- Install EspMQTTClient library (Tested working with version 1.13.3)
- Install ArduinoJson library (Tested working with version 6.19.4)
- Install CRC32 library (by Christopher Baker) (Tested working with version 2.0.0)
- Install ArduinoQueue library (Tested working with version 1.2.5)
-
Modify code for your Wifi and MQTT configurations and SwitchBot MAC addresses
Configurations to change can be found in the code under these line...
/****************** CONFIGURATIONS TO CHANGE *******************/ /********** REQUIRED SETTINGS TO CHANGE **********/Stop when you see this line...
/********** ADVANCED SETTINGS - ONLY NEED TO CHANGE IF YOU WANT TO TWEAK SETTINGS **********/ - Compile and upload to ESP32 (I am using Wemos D1 Mini ESP32)
- Reboot ESP32 plug it in with 5v usb (no data needed)
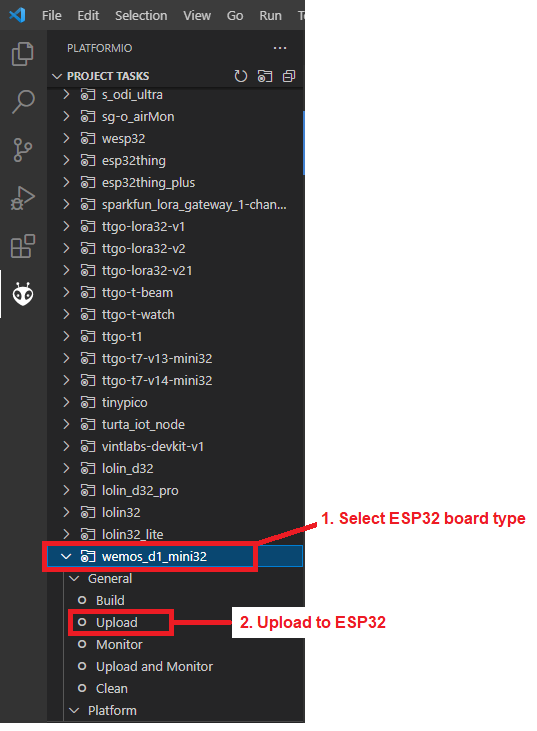
Steps to Install on ESP32 - Using Visual Studio Code - PlatformIO
- Install Visual Studio Code
- Add the PlatformIO extension to VSCode
- Open SwitchBot-BLE2MQTT-ESP32 project from PlatformIO
-
Modify SwitchBot-BLE2MQTT-ESP32.cpp code for your Wifi and MQTT configurations and SwitchBot MAC addresses
Configurations to change can be found in the code under these line...
/****************** CONFIGURATIONS TO CHANGE *******************/ /********** REQUIRED SETTINGS TO CHANGE **********/Stop when you see this line...
/********** ADVANCED SETTINGS - ONLY NEED TO CHANGE IF YOU WANT TO TWEAK SETTINGS **********/ - Choose your ESP32 board type and Upload to ESP32
- Reboot ESP32 plug it in with 5v usb (no data needed)
Steps for OTA update
- Download the latest version of the ESP32 code
- Edit the code with your Wifi, MQTT, Switchbot device MAC configurations
- Compile a .bin file using the IDE you are using
- Open the ESP32 IP address in a web browser
- Upload the new .bin file from the web browser
- Check from the web browser that the version is the correct version
Steps for ESP32 Mesh setup (Look at the EXAMPLES folder for different configuration between Primary and Secondary ESP32s
- Decide how many ESP32s you want to use
- Choose one ESP32 as the primary and set the host value. Example:
static const char* host = "esp32"; - Setup the other ESP32s as secondary ESP32s. Set unique host values. Example:
static const char* host = "esp32mesh1"; - Setup the other ESP32s as secondary ESP32s. Set meshHost to the primary ESP32 host value. Example:
static const char* meshHost = "esp32"; - Decide on the other configurations:
- Primary ESP32 can be set to Active and Passive Scan, or Active Scan only (if you are also using switchbot hub/app and what statuses to be synched constantly)
- Secondary ESP32s can be set to passive scan only, or active scan less than the primary ESP32
NOTES:
In a MESH setup, messages will be routed through the primary ESP32. The primary ESP32 will keep counts of things like contact/motion/button pushes to ensure duplicates messages are not sent out. Each ESP32 will receive the BLE data from the device, so performance is greatly increased. The first ESP32 to detect the data change will result in a faster MQTT data publish
*Meshing only works for motion sensors, contact sensors and temp meters. Add the motion/contact/meter MAC address to all or most meshed ESP32s. Add the Bot and Curtain and Plug MACs only once on the ESP32 closest to the device
Active Scanning:
- Active Scanning uses more battery on switchbot devices. It requests a read response from the switchbot devices
- Active Scanning provides more data like battery info
- Active Scanning is required by Bots and CurtainsPassive Scanning:
- Passive Scanning uses less battery on switchbot devices. It does not request a read response from the switchbot devices
- Passive Scanning does not provide battery info in most cases, but provides state (ON/OFF, temp, contact, motion, humidity ... etc)
- Passive Scanning is good enough for Motion, Contact, Meter and PlugsVideos and Tutorials on Youtube
by KPeyanski (Language English. based on v6.4. Home Assistant)
https://www.youtube.com/watch?v=ZskFhma8atc
by CTech&Media (Language German. based on v1.5. Home Assistant)
https://www.youtube.com/watch?v=HiBZb-IAbD8
by BangerTech (Language German. based on v6.1. OpenHab)
https://www.youtube.com/watch?v=TmtCwZbDJIU
ESP32 models that I can confirm work
- Wemos D1 Mini ESP32
- ESP32-WROOM-32U (With external antenna)
- ESP32-WROOM-32 (With internal antenna)
- QuinLED-ESP32-AE
- QuinLED-ESP32-AB
- Heltec WiFi Kit 32
ESP32 models/boards that the community has confirmed as working
- AZ-Delivery ESP32 Dev KitC v2
- AZ-Delivery ESP32 Dev KitC v4
ESP32 models that may not work
- ESP32-S2 = No Bluetooth so definitely won't work
- ESP32-C3 = Less RAM/ROM that the WROOM models
- ESP32s = Ai-Thinker model. Some users have said they had issues with this model
- ESP32-solo = Only has one core instead of 2 cores
Known Supported SwitchBot devices and firmware versions
- Bot = Firmware v6.2
- Curtain = Firmware v4.6
- Meter/MeterPlus = Firmware v2.7
- Contact Sensor = Firmware v1.1
- Motion Sensor = Firmware v1.3
- Plug Mini = Firmware v1.3