Comparison of Depth Cameras: Kinect V2 and Zed 2i
Body Tracking in SoSe 2021
@jana2308walter @a-spork
Goals
In this project the two depth cameras Microsoft Kinect V2 and Stereolabs Zed 2i are compared in terms of application areas and possible uses. The aim is to identify the advantages and disadvantages of the two systems and to be able to make recommendations for different areas of application. A special focus is on object tracking in space and the detection of persons and their movements or body posture. For this purpose we mainly use the depth cameras and the skeleton view.
Kinect V2
Installation requirements
-
Supported Operating System
- Embedded 8 Standard, Windows 8, Windows 8.1 or later
-
Recommended Hardware Configuration
- 64-bit (x64) processor
- 4 GB Memory (or more)
- Physical dual-core 3.1 GHz (2 logical cores per physical) or faster processor
- USB 3.0 controller dedicated to the Kinect for Windows v2 sensor
- DX11 capable graphics adapter
- A Microsoft Kinect v2 sensor, which includes a power hub and USB cabling
-
Software Requirements
- Visual Studio 2012 or Visual Studio 2013
Installation instructions
You can find the Kinect for Windows SDK 2.0 here: https://www.microsoft.com/en-us/download/details.aspx?id=44561
Use instructions
The Kinect V2 supports C#, C++ In this pictures you can see the RGB, the skeleton view and the depth map with the Kinect V2 (Depthcamera shows different input):
In this picture you can see the the RGB view and the object detection on the map with the Kinect V2:

ZED 2i
Installation requirements
- Python (We used Python 3.8)
- Anaconda
- Microsoft Visual Studio Code (It has to be executable with Anaconda)
- Cuda
- Zed SDK
- Packages:
- cython
- numpy
- opencv
- py-opencv
- pyopengl
- pyzed
- zlib
Installation instructions
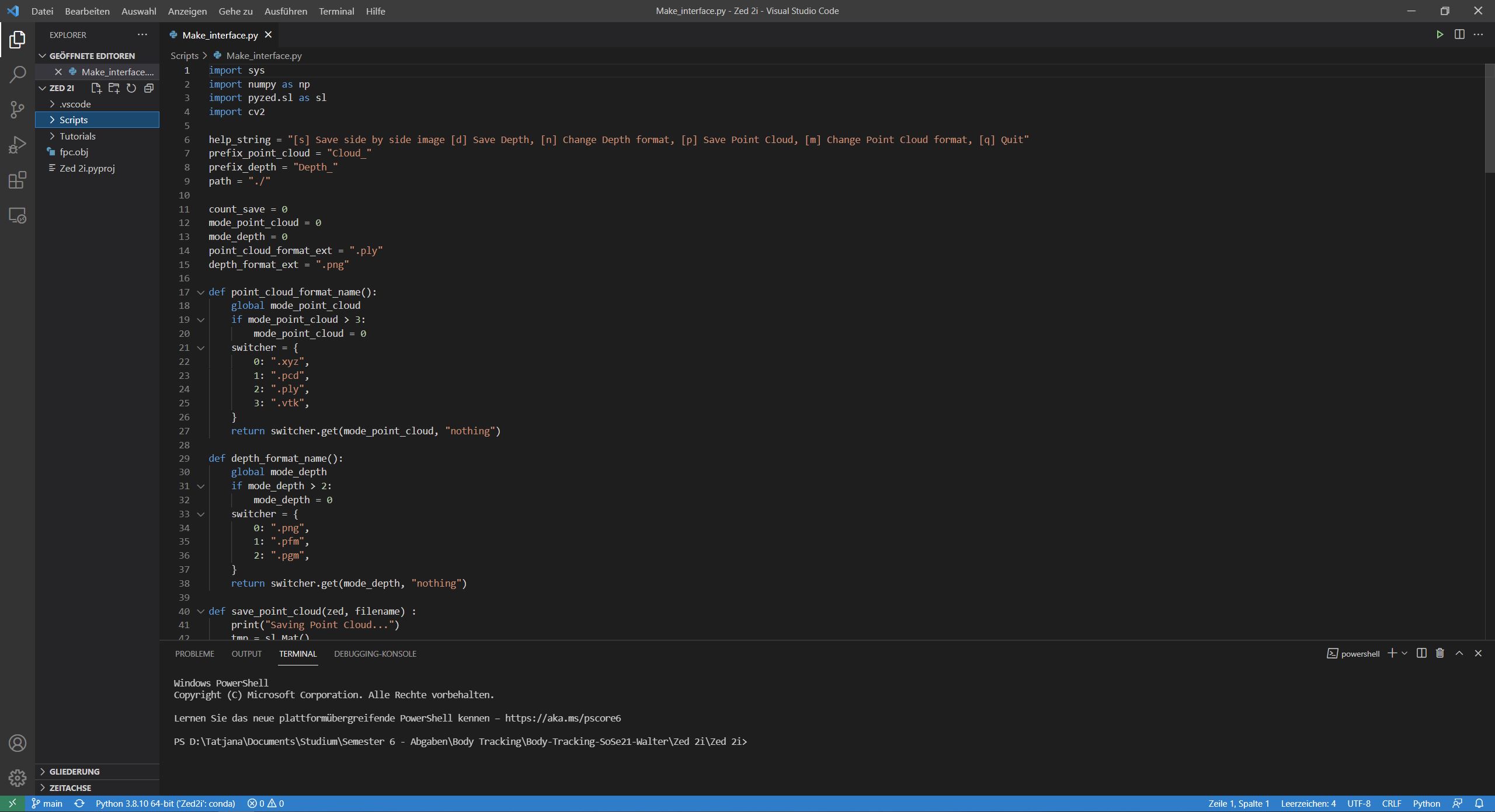
For the use of this camera it is helpful to use Visual Studio Code. The camera is compatible with C#, C++ and Python, so we decided to use Python for this course. Also we suggest to use Anaconda to install all the needed packages and an individual development environment. If you want to use our scripts you have to install the needed packages first (Described above). After you installed the packages correctly, the Scripts should run and if your camera is connected to your computer, you can start to work.
Use instructions
With the scripts from this repository you can activate the various views of the Zed 2i:
- Make_interface: Here you can see the Depth Map and a RGB view
- Body_tracking: Here you can see the Skeleton View and a RGB view with the similar skeletons on the persons
- Birds eye viewer: Here you can see a function used for person detection in a room seen on a map, in a pointcloud and in RGB
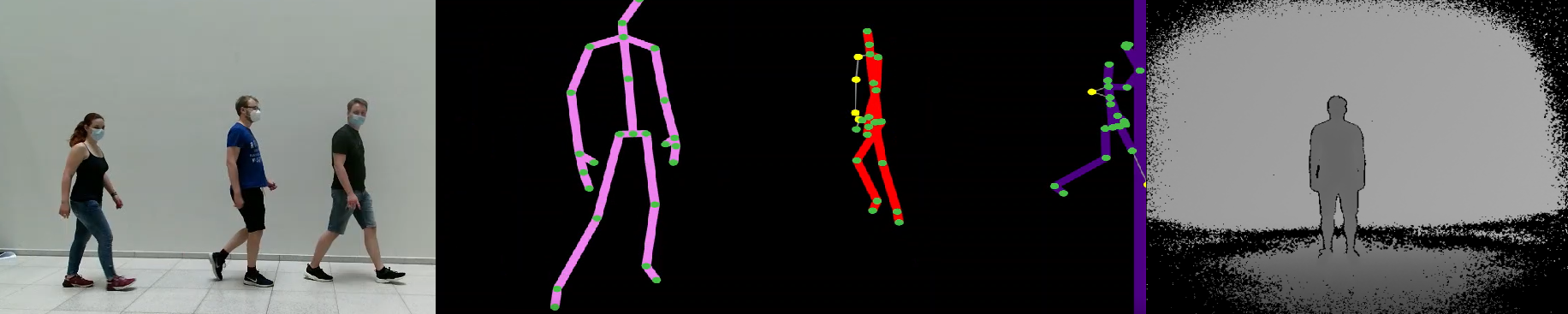
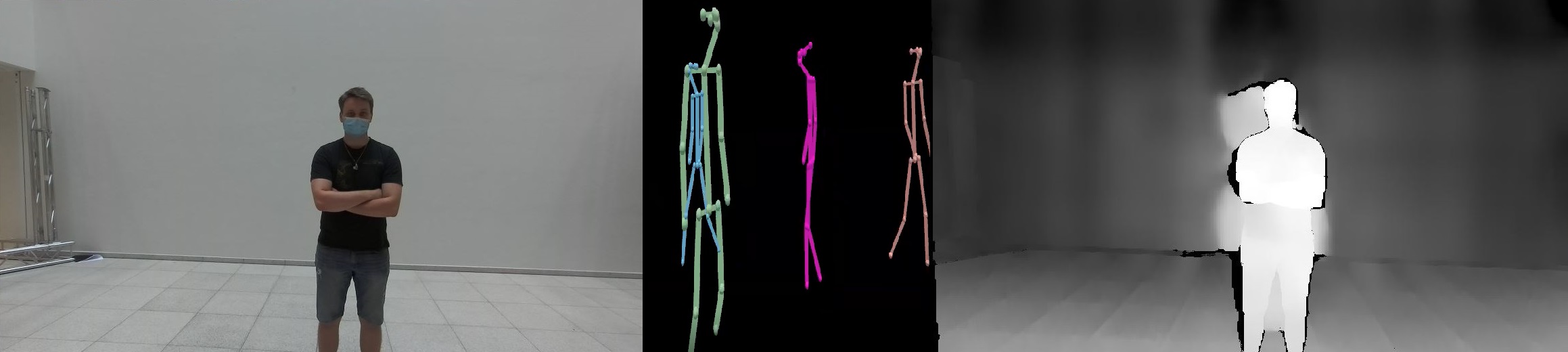
In this pictures you can see the RGB, the skeleton view and the depth map with the Zed 2i (skeleton view shows not the same image):
In this picture you can see the pointcloud, the RGB view and the object detection on the map with the Zed 2i:
