JMSimplifyUtils
Description
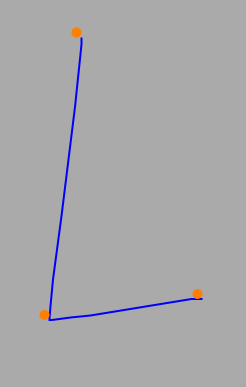
假设我们绘制一条曲线,但是这条曲线可能就是一条折线,那么构成这条折线的组成关键点就只需要3个点,这三个点就是“关键特征点”。
最早考虑使用Ramer–Douglas–Peucker,后面简称RDP,这个通常意义上的路径压缩算法来实现,但是后来发现如果这个算法不改进的话,会存在一个严重的问题:起始点和终点小于容忍度的话,那么只能得到起点和终点,所有中间点都会被忽略,而且你无法按照你想获取的最大点数来获取关键特征点。
于是,自己又通过简单的三角函数+归并算法,来实现对路径的特征关键点进行提取。
具体算法描述如下:
- 将曲线点左右两组。
- 计算组是否为最小组,不是,则继续划分,是则计算最小组,得到最新的关键特征点。
- 将计算过后的过滤点左右两组合并,得到所需的组关键特征点。
最小组关键特征点的算法描述:
假设有a,b,c,d三个点:
- 取a,b,c三个点计算夹角A,取b,c,d三个点计算夹角B
- 如果夹角A比夹角B小的话,就过滤掉b点,反之过滤c。
- 返回最终的三个点。
得到具体效果如下:

在使用效果来看,自己的角度算法得到的效果要优于RDP算法,感兴趣的话,可以手动在Demo中切换获取关键点的方式,这里JMSimplifyUtils提供了两种方式来让你得到关键特征点。
使用方法如下:
User Guide
通过RDP算法,来获取关键特征点,pointArray:需要计算的曲线点组,tolerance:最小容忍度 (最小容忍度一般可以设置为手机的dpi值)
+(NSMutableArray *)simplifyByRDP:(NSArray *)pointArray tolerance:(double)tolerance;
通过三角函数+归并算法计算关键特征点
pointArray:需要计算的曲线点组 maxCount:需要获取最大关键特征点的个数
+(NSMutableArray *)simplifyByAngle:(NSArray *)pointArray maxCount:(NSInteger)maxCount;