UAV-auto-navigation-and-object-tracking-based-on-RL
毕业设计的代码部分,实现了UE4和airsim环境下无人机自主导航和目标跟踪的强化学习算法。
新建交流学习qq群:828214880,对强化学习和Airsim之类感兴趣的可以一起讨论学习
b站对应地址:
https://www.bilibili.com/video/BV14R4y1L7MQ/
UE4部分主要参考了以下工程[https://github.com/harvard-edge/AirLearning], 算法和接口部分是自行实现的,这里不建议使用https://github.com/harvard-edge/airlearning-rl/tree/dcd8a39f77992873f49b6872aa534a64a2bfa23a 这个库开发,笔者在此基础上做了很多优化和改进(踩了很多坑)。
PS:因为疫情原因毕业生进不去学校没办法去制作docker了,都是copy出来的文件,环境问题可能需要大家自行去解决一下了。
1.UAV RL仿真环境调研
关于仿真环境,笔者当时主要针对于开源和free的项目进行。调研了几个开源的仿真环境,并做了对比,供需要的人使用:
gazebo
体积小运行快,视觉效果比较差,物理规则简单,但是是ros原生的仿真器,对于后期RL迁移系统部署会很方便,而且可开发性很强,API主要接口是c++和py。
unity
几款流行的物理引擎之一,画质清晰,一些开源项目中是用unity的,但是貌似用的人没有下面的UE4多,所以没有过多调研,放下一些项目链接:
PS:现在unity也有airsim的支持了
mbaske/ml-drone-collection
https://github.com/mbaske/ml-drone-collection
phachara-laohrenu/DQN-ObstacleAvoidance-FixedWingUAV
https://github.com/phachara-laohrenu/DQN-ObstacleAvoidance-FixedWingUAV
第二个项目很适合做路径规划任务。
UE4+airsim
是比较多的大型项目的标配了,也是毕设所采用的主要环境,开发性还好,环境部分可以用ue4c++定制,而且微软airsim的文档维护的也比较好,各种API用着也还可以(有时候也会觉得蛋疼),文档全,photorealistic,适合DRL训练,后期开发性也不错,开源项目很多可以学习和开发,缺点是对平台要求挺高(电脑最好给力点),运行比较慢,项目版本问题有时候会让人很蛋疼,后期切换到实际系统可能会费很大劲。
一些开源项目的链接:
aqeelanwar/PEDRA
https://github.com/aqeelanwar/PEDRA
特别适合导航任务,场景丰富,同时飞机模型也比较多。
airlearning
https://github.com/harvard-edge/airlearning
比较适合DRL的开发场景,集成了env setting,支持domain randomization,对于强化学习算法来说,data的质量应该是非常高的,训练起来个人觉得成功率也会比较大,所以作为了本项目的主要环境进行后续开发,版本为UE4的4.18.3。
2.UE4安装
主要是在Ubuntu下配置的
(1)安装UE4,版本4.18.3:
git clone -b 4.18 https://github.com/EpicGames/UnrealEngine.git
cd UnrealEngine
./Setup.sh
./GenerateProjectFiles.sh
make(2)安装project:
git clone https://github.com/harvard-edge/airlearning-ue4.git
这里要先编辑AirLearning.uproject,删除这个地方
"Plugins": [
{
"Name": "AirSim",
"Enabled": true
}
],然后才可以compile并打开这个项目,如遇到以下问题:

(3)下载本项目中的airsim-rl
./setup.sh
./build.shsetup.sh这里可能会遇到问题,修改setup.sh下面eigen的地方为:
rm -rf ./AirLib/deps/eigen3/Eigen
echo "downloading eigen..."
wget https://gitlab.com/libeigen/eigen/-/archive/3.3.2/eigen-3.3.2.zip
unzip eigen-3.3.2.zip -d temp_eigen
mkdir -p AirLib/deps/eigen3
mv temp_eigen/eigen*/Eigen AirLib/deps/eigen3
rm -rf temp_eigen
rm eigen-3.3.2.zipairsim安装好了之后,将Unreal/Plugins copy到workspace/airLearning-ue4下即可,接下来编辑AirLearning.uproject为
{
"FileVersion": 3,
"EngineAssociation": "4.18",
"Category": "",
"Description": "",
"Modules": [
{
"Name": "JsonParsing18Version",
"Type": "Runtime",
"LoadingPhase": "Default",
"AdditionalDependencies": [
"Engine",
"AirSim"
]
}
],
"Plugins": [
{
"Name": "AirSim",
"Enabled": true
}
],
"TargetPlatforms": [
"MacNoEditor",
"WindowsNoEditor"
]
}接下来打开工程这一步很重要,不要直接打开project,否则是启动不了的,需要进到UnrealEngine installation folder and start Unreal by running ./Engine/Binaries/Linux/UE4Editor,需要启动UE4Editor,然后点击浏览,选择打开AirLearning.uproject,这个时候会弹出一个框图,选择options中的原位转换,这时才会rebuild相关的文件,等待片刻,就可以了。

(4)设置Game Mode
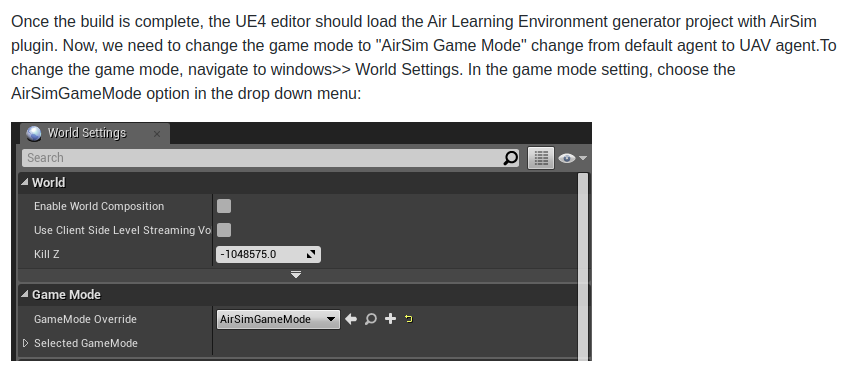 好了,到这一步,build+start就可以了,环境配置完成。
好了,到这一步,build+start就可以了,环境配置完成。
3.Domain randomization的实现
这部分的代码逻辑主要是上文的https://github.com/harvard-edge/airlearning-rl/tree/dcd8a39f77992873f49b6872aa534a64a2bfa23a 工程中ue4c++和蓝图类配合实现的,通过读取环境配置在每局游戏开始后自动生成生成环境的尺寸,障碍物数量,墙壁颜色,目标点位置等等,这些恰好足够我们设计自主导航功能的训练(感兴趣的可以阅读里面的代码开发更多随机初始化操作,可以使你的模型更好),对于本任务来说只需要修改Content/JsonFiles/EnvGenConfig就可以了。满足数据的domain random,通过每局重新生产成新的随机环境使得model的泛化性能和抗扰性都会增强。
4.airsim-rl
这部分是笔者主要写的包,里面将Airsim和UE4的操作api都进行了封装,并形成了gym格式,你可以直接像操作gym环境一样进行step和reset,目前里面设计了DQN,PPO,SAC等算法。
执行一次(复制操作)
cd misc/move_to_airsim
python client.py之后就可以启动对应算法进行训练了,airsim中对应飞机传感器和数据类型的设置在airsim的官方doc中都有,可以自行修改,修改后记得到gym_aisrm中修改对应的api来获取你想要的数据格式,然后修改state空间即可。
5.后续
RL训练自主导航的过程主要是在这个环境中,视频里跟踪移动的行人和避障测试都是在自己搭建的UE4环境里实现的,实现过程也很简单,只是换个工程而已都是通过aisrim的插件实现的。
3D目标检测部分的话是基于https://github.com/lzccccc/SMOKE 这个project实现的,安装好smoke后,即可使用3D目标检测+实时导航实现目标追踪效果。
训练曲线和调试超参就不放了,以及SAC算法中设计的self-attention部分也不解释了,有兴趣的可以去看看我的毕业论文(勿喷)。