![]()




![]()





Spatial Representations for Artificial Intelligence
⚠️🚧 This library is under HEAVY development. Expect breaking changes between minor versions 🚧⚠️
💬 Feel free to open an issue if you find anything confusing or not working 💬
Project Spatial Representations for Artificial Intelligence (srai) aims to provide simple and efficient solutions to geospatial problems that are accessible to everybody and reusable in various contexts where geospatial data can be used. It is a Python module integrating many geo-related algorithms in a single package with unified API. Please see getting started for installation and quick start instructions.
Use cases
In the current state, srai provides the following functionalities:
- OSM data download - downloading OpenStreetMap data for a given area using different sources
- OSM data processing - processing OSM data to extract useful information (e.g. road network, buildings, POIs, etc.)
- GTFS processing - extracting features from GTFS data
- Regionalization - splitting a given area into smaller regions using different algorithms (e.g. Uber's H3[1], Voronoi, etc.)
- Embedding - embedding regions into a vector space based on different spatial features, and using different algorithms (eg. hex2vec[2], etc.)
- Utilities for spatial data visualization and processing
For future releases, we plan to add more functionalities, such as:
- Pre-computed embeddings - pre-computed embeddings for different regions and different embedding algorithms
- Full pipelines - full pipelines for different embedding approaches, pre-configured from
sraicomponents - Image data download and processing - downloading and processing image data (eg. OSM tiles, etc.)
End-to-end examples
Right now, srai provides a toolset for data download and processing sufficient to solve downstream tasks. Please see this project by @RaczeQ, which predicts Bike Sharing System (BSS) stations' locations for a wide range of cities worldwide.
For srai integration into full kedro pipeline, see this project by @Calychas.
Installation
To install srai simply run:
pip install sraiThis will install the srai package and dependencies required by most of the use cases. There are several optional dependencies that can be installed to enable additional functionality. These are listed in the optional dependencies section.
Optional dependencies
The following optional dependencies can be installed to enable additional functionality:
srai[all]- all optional dependenciessrai[osm]- dependencies required to download OpenStreetMap datasrai[voronoi]- dependencies to use Voronoi-based regionalization methodsrai[gtfs]- dependencies to process GTFS datasrai[plotting]- dependencies to plot graphs and mapssrai[torch]- dependencies to use torch-based embedders
Tutorial
For a full tutorial on srai and geospatial data in general visit the srai-tutorial repository. It contains easy to follow jupyter notebooks concentrating on every part of the library. Additionally, there is a recording available from the EuroScipy 2023 conference covering that material.
Usage
If you prefer an interactive notebook, examples of srai usage are available in this Colab Notebook
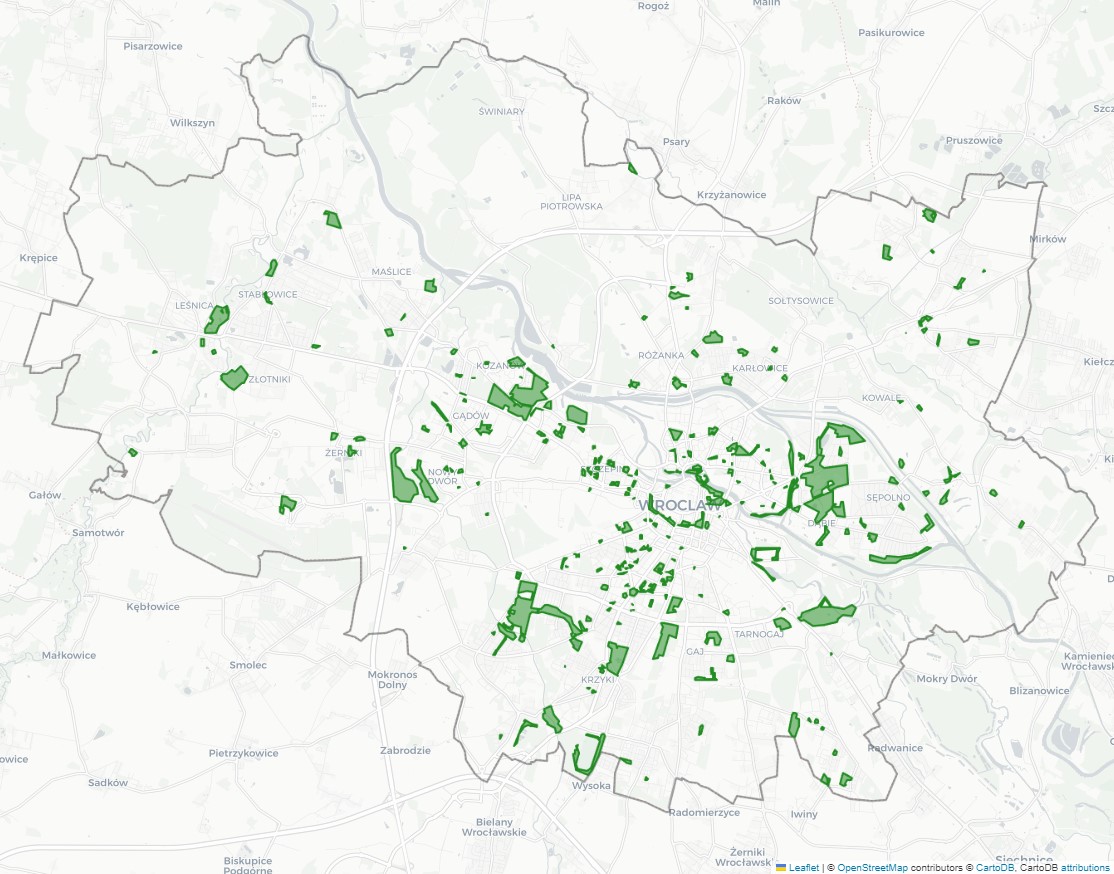
Downloading OSM data
To download OSM data for a given area, using a set of tags use one of OSMLoader classes:
OSMOnlineLoader- downloads data from OpenStreetMap API using osmnx - this is faster for smaller areas or tags countsOSMPbfLoader- loads data from automatically downloaded PBF file from protomaps - this is faster for larger areas or tags counts
Example with OSMOnlineLoader:
from srai.loaders import OSMOnlineLoader
from srai.plotting import plot_regions
from srai.regionalizers import geocode_to_region_gdf
query = {"leisure": "park"}
area = geocode_to_region_gdf("Wrocław, Poland")
loader = OSMOnlineLoader()
parks_gdf = loader.load(area, query)
folium_map = plot_regions(area, colormap=["rgba(0,0,0,0)"], tiles_style="CartoDB positron")
parks_gdf.explore(m=folium_map, color="forestgreen")
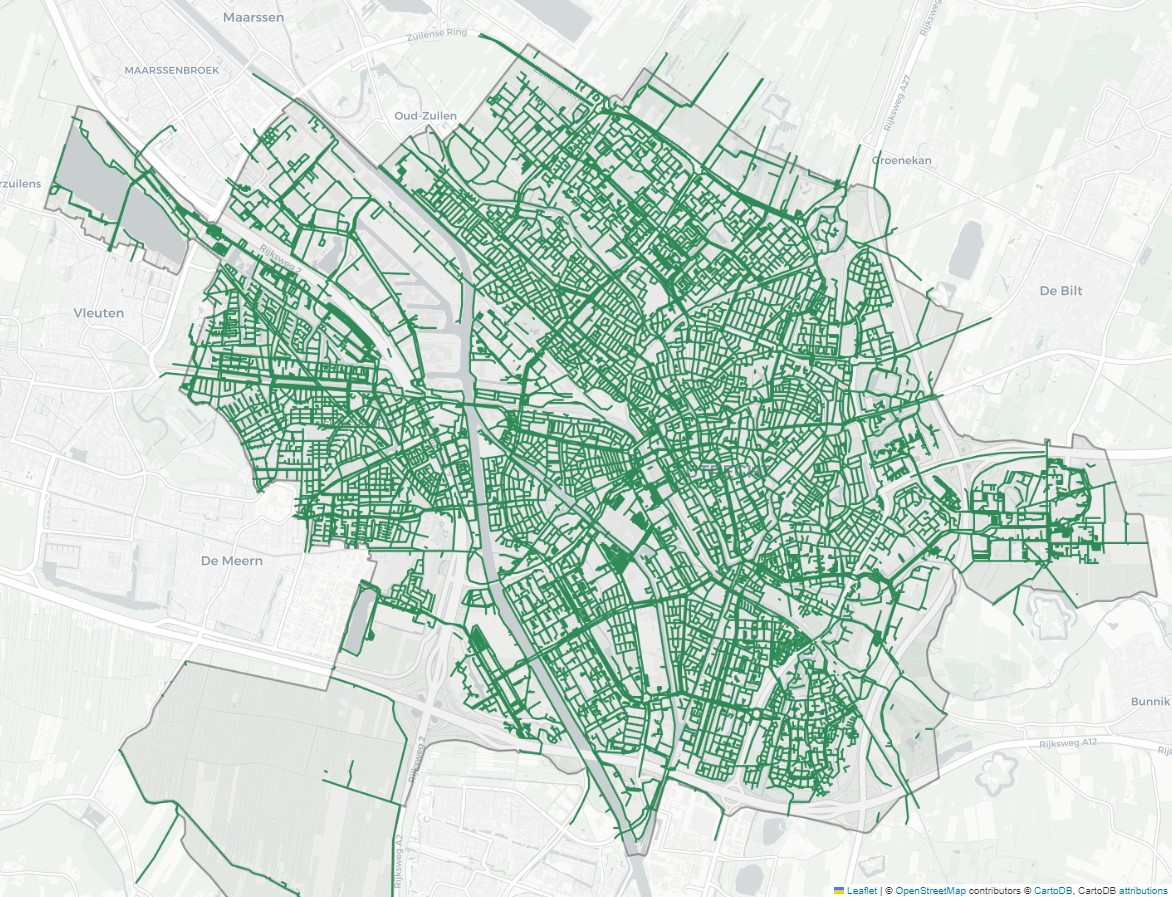
Downloading road network
Road network downloading is a special case of OSM data downloading. To download road network for a given area, use OSMWayLoader class:
from srai.loaders import OSMNetworkType, OSMWayLoader
from srai.plotting import plot_regions
from srai.regionalizers import geocode_to_region_gdf
area = geocode_to_region_gdf("Utrecht, Netherlands")
loader = OSMWayLoader(OSMNetworkType.BIKE)
nodes, edges = loader.load(area)
folium_map = plot_regions(area, colormap=["rgba(0,0,0,0.1)"], tiles_style="CartoDB positron")
edges[["geometry"]].explore(m=folium_map, color="seagreen")
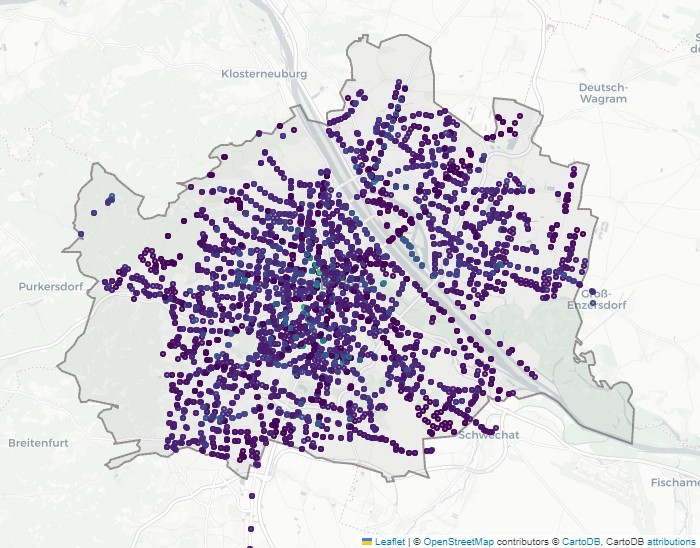
Downloading GTFS data
To extract features from GTFS use GTFSLoader. It will extract trip count and available directions for each stop in 1h time windows.
from pathlib import Path
from srai.loaders import GTFSLoader, download_file
from srai.plotting import plot_regions
from srai.regionalizers import geocode_to_region_gdf
area = geocode_to_region_gdf("Vienna, Austria")
gtfs_file = Path("vienna_gtfs.zip")
download_file("https://transitfeeds.com/p/stadt-wien/888/latest/download", gtfs_file.as_posix())
loader = GTFSLoader()
features = loader.load(gtfs_file)
folium_map = plot_regions(area, colormap=["rgba(0,0,0,0.1)"], tiles_style="CartoDB positron")
features[["trips_at_8", "geometry"]].explore("trips_at_8", m=folium_map)
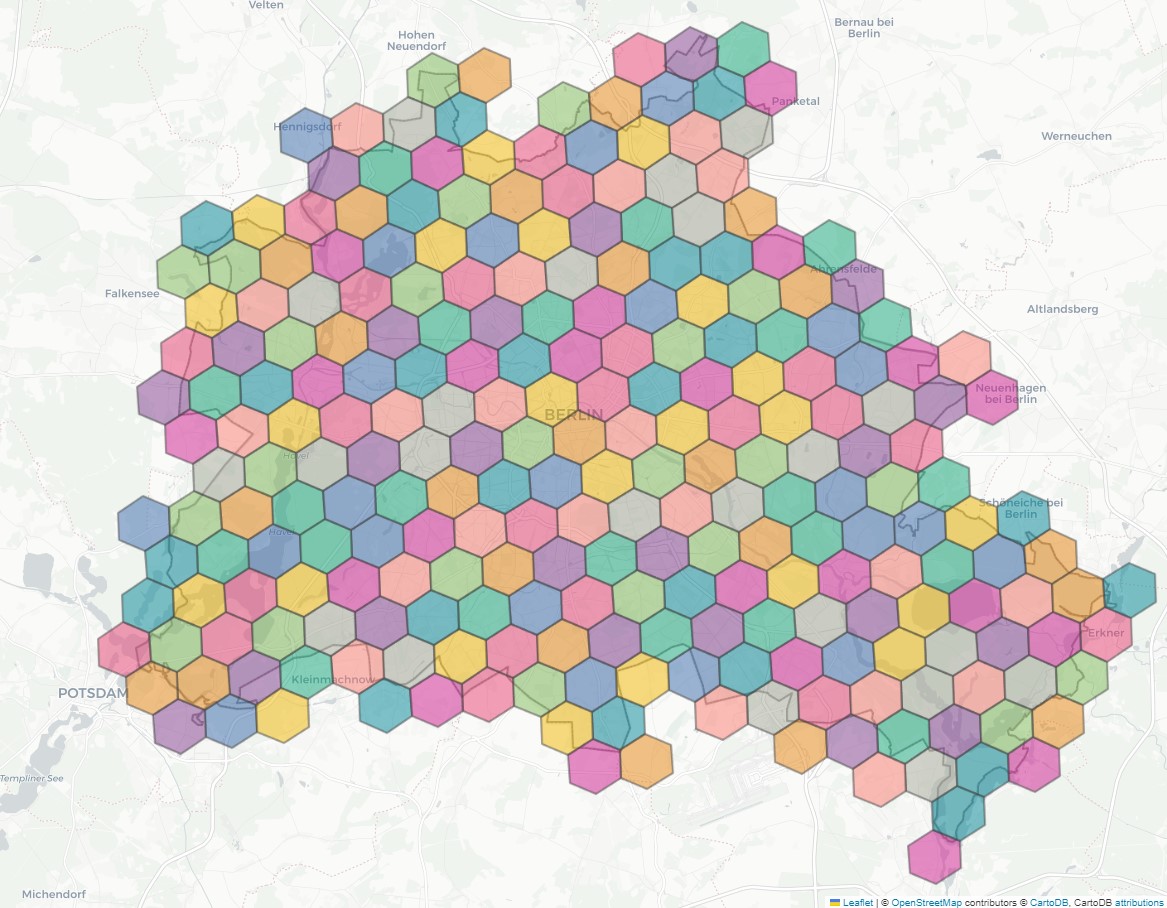
Regionalization
Regionalization is a process of dividing a given area into smaller regions. This can be done in a variety of ways:
H3Regionalizer- regionalization using Uber's H3 libraryS2Regionalizer- regionalization using Google's S2 libraryVoronoiRegionalizer- regionalization using Voronoi diagramAdministativeBoundaryRegionalizer- regionalization using administrative boundaries
Example:
from srai.regionalizers import H3Regionalizer, geocode_to_region_gdf
area = geocode_to_region_gdf("Berlin, Germany")
regionalizer = H3Regionalizer(resolution=7)
regions = regionalizer.transform(area)
folium_map = plot_regions(area, colormap=["rgba(0,0,0,0.1)"], tiles_style="CartoDB positron")
plot_regions(regions_gdf=regions, map=folium_map)
Embedding
Embedding is a process of mapping regions into a vector space. This can be done in a variety of ways:
Hex2VecEmbedder- embedding using hex2vec[1] algorithmGTFS2VecEmbedder- embedding using GTFS2Vec[2] algorithmCountEmbedder- embedding based on features countsContextualCountEmbedder- embedding based on features counts with neighbourhood context (proposed in [3])Highway2VecEmbedder- embedding using Highway2Vec[4] algorithm
All of those methods share the same API. All of them require results from Loader (load features), Regionalizer (split area into regions) and Joiner (join features to regions) to work. An example using CountEmbedder:
from srai.embedders import CountEmbedder
from srai.joiners import IntersectionJoiner
from srai.loaders import OSMOnlineLoader
from srai.plotting import plot_regions, plot_numeric_data
from srai.regionalizers import H3Regionalizer, geocode_to_region_gdf
loader = OSMOnlineLoader()
regionalizer = H3Regionalizer(resolution=9)
joiner = IntersectionJoiner()
query = {"amenity": "bicycle_parking"}
area = geocode_to_region_gdf("Malmö, Sweden")
features = loader.load(area, query)
regions = regionalizer.transform(area)
joint = joiner.transform(regions, features)
embedder = CountEmbedder()
embeddings = embedder.transform(regions, features, joint)
folium_map = plot_regions(area, colormap=["rgba(0,0,0,0.1)"], tiles_style="CartoDB positron")
plot_numeric_data(regions, "amenity_bicycle_parking", embeddings, map=folium_map)
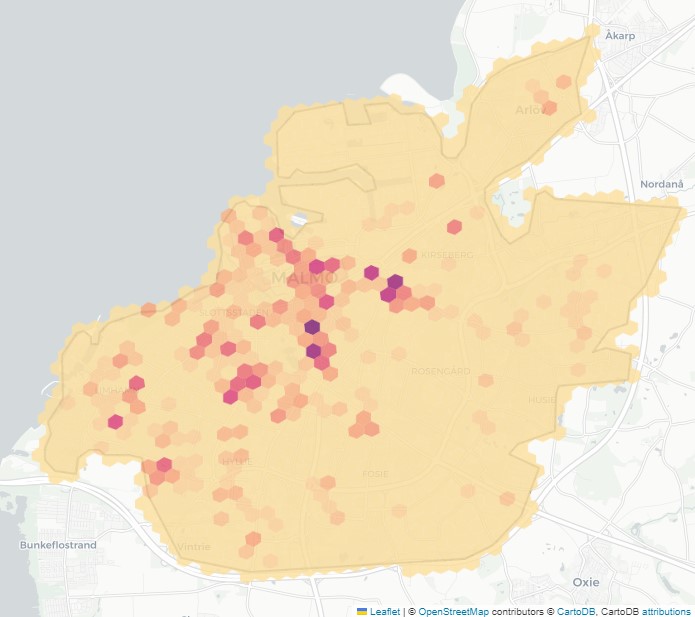
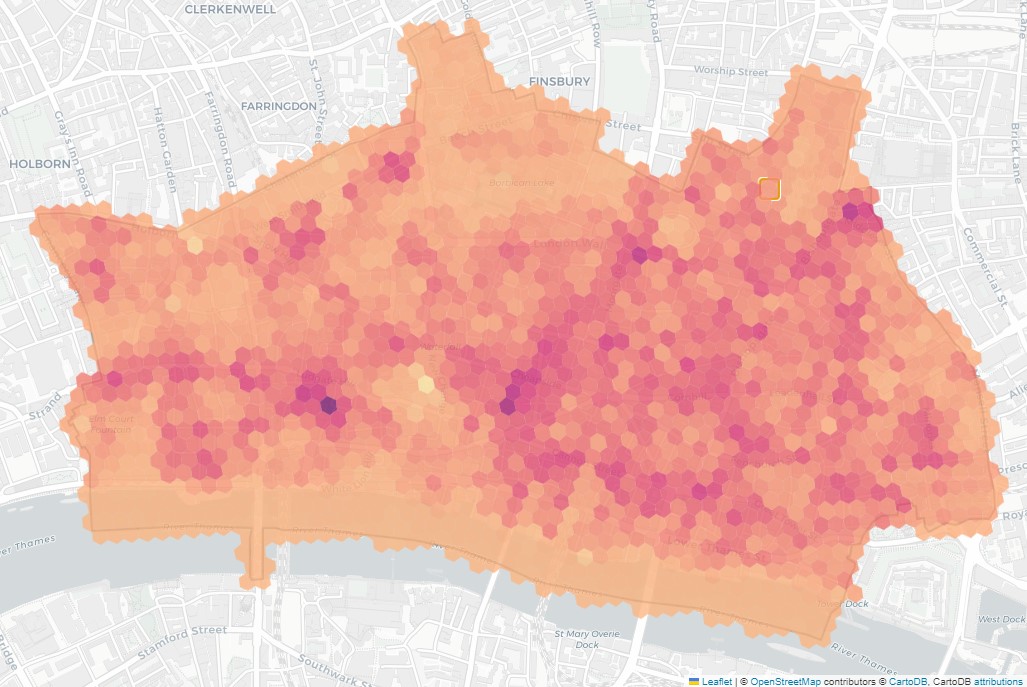
CountEmbedder is a simple method, which does not require fitting. Other methods, such as Hex2VecEmbedder or GTFS2VecEmbedder require fitting and can be used in a similar way to scikit-learn estimators:
from srai.embedders import Hex2VecEmbedder
from srai.joiners import IntersectionJoiner
from srai.loaders import OSMPbfLoader
from srai.loaders.osm_loaders.filters import HEX2VEC_FILTER
from srai.neighbourhoods.h3_neighbourhood import H3Neighbourhood
from srai.regionalizers import H3Regionalizer, geocode_to_region_gdf
from srai.plotting import plot_regions, plot_numeric_data
loader = OSMPbfLoader()
regionalizer = H3Regionalizer(resolution=11)
joiner = IntersectionJoiner()
area = geocode_to_region_gdf("City of London")
features = loader.load(area, HEX2VEC_FILTER)
regions = regionalizer.transform(area)
joint = joiner.transform(regions, features)
embedder = Hex2VecEmbedder()
neighbourhood = H3Neighbourhood(regions_gdf=regions)
embedder = Hex2VecEmbedder([15, 10, 3])
# Option 1: fit and transform
# embedder.fit(regions, features, joint, neighbourhood, batch_size=128)
# embeddings = embedder.transform(regions, features, joint)
# Option 2: fit_transform
embeddings = embedder.fit_transform(regions, features, joint, neighbourhood, batch_size=128)
folium_map = plot_regions(area, colormap=["rgba(0,0,0,0.1)"], tiles_style="CartoDB positron")
plot_numeric_data(regions, 0, embeddings, map=folium_map)
Pre-trained models usage
We provide pre-trained models for some of the embedding methods. To use them, simply download them from here and load them using load method:
from srai.embedders import Hex2VecEmbedder
model_path = "path/to/model"
embedder = Hex2VecEmbedder.load(model_path)Plotting, utilities and more
We also provide utilities for different spatial operations and plotting functions adopted to data formats used in srai For a full list of available methods, please refer to the documentation.
Contributing
If you are willing to contribute to srai, feel free to do so! Visit our contributing guide for more details.
Publications
Some of the methods implemented in srai have been published in scientific journals and conferences.
- Szymon Woźniak and Piotr Szymański. 2021. Hex2vec: Context-Aware Embedding H3 Hexagons with OpenStreetMap Tags. In Proceedings of the 4th ACM SIGSPATIAL International Workshop on AI for Geographic Knowledge Discovery (GEOAI '21). Association for Computing Machinery, New York, NY, USA, 61–71. paper, arXiv
- Piotr Gramacki, Szymon Woźniak, and Piotr Szymański. 2021. Gtfs2vec: Learning GTFS Embeddings for comparing Public Transport Offer in Microregions. In Proceedings of the 1st ACM SIGSPATIAL International Workshop on Searching and Mining Large Collections of Geospatial Data (GeoSearch'21). Association for Computing Machinery, New York, NY, USA, 5–12. paper, arXiv
- Kamil Raczycki and Piotr Szymański. 2021. Transfer learning approach to bicycle-sharing systems' station location planning using OpenStreetMap data. In Proceedings of the 4th ACM SIGSPATIAL International Workshop on Advances in Resilient and Intelligent Cities (ARIC '21). Association for Computing Machinery, New York, NY, USA, 1–12. paper, arXiv
- Kacper Leśniara and Piotr Szymański. 2022. Highway2vec: representing OpenStreetMap microregions with respect to their road network characteristics. In Proceedings of the 5th ACM SIGSPATIAL International Workshop on AI for Geographic Knowledge Discovery (GeoAI '22). Association for Computing Machinery, New York, NY, USA, 18–29. paper, arXiv
- Daniele Donghi and Anne Morvan. 2023. GeoVeX: Geospatial Vectors with Hexagonal Convolutional Autoencoders. In Proceedings of the 6th ACM SIGSPATIAL International Workshop on AI for Geographic Knowledge Discovery (GeoAI '23). Association for Computing Machinery, New York, NY, USA, 3–13. paper
Acknowledgements
We would like to thank Piotr Szymański PhD (@niedakh) for his invaluable guidance and support in the development of this library. His expertise and mentorship have been instrumental in shaping the library's design and functionality, and we are very grateful for his input.
Citation
If you wish to cite the SRAI library, please use our paper
@inproceedings{
Gramacki_SRAI_Towards_Standardization_2023,
author = {
Gramacki, Piotr and
Leśniara, Kacper and
Raczycki, Kamil and
Woźniak, Szymon and
Przymus, Marcin and
Szymański, Piotr
},
booktitle = {Proceedings of the 6th ACM SIGSPATIAL International Workshop on AI for Geographic Knowledge Discovery},
month = nov,
publisher = {Association for Computing Machinery},
title = {{SRAI: Towards Standardization of Geospatial AI}},
url = {https://dl.acm.org/doi/10.1145/3615886.3627740},
year = {2023}
}License
This library is licensed under the Apache License 2.0.
The free OpenStreetMap data, which is used for the development of SRAI, is licensed under the Open Data Commons Open Database License (ODbL) by the OpenStreetMap Foundation (OSMF).