 osrf-migration
commented
9 years ago
osrf-migration
commented
9 years ago Open osrf-migration opened 9 years ago
osrf-migration
commented
9 years ago osrf-migration
commented
9 years ago Original comment by Ian Chen (Bitbucket: Ian Chen, GitHub: iche033).
The problem is most likely that What are the files in the turtlebot_description is in urdf format. Currently gzweb supports sdf only.turtlebot_description folder in assets?
Loading of models in gzweb is specific to gazebo model dir structure at the moment, and supports collada files only.
osrf-migration
commented
9 years ago Original comment by Ian Chen (Bitbucket: Ian Chen, GitHub: iche033).
We have this turtlebot_description model working in gzweb a while back, have not tested it recently though.
osrf-migration
commented
9 years ago Original comment by Kei Okada (Bitbucket: k-okada).
@furushchev, did you use spawn_model ? to publish robot model in gazebo from urdf? if so, it uses absolute path from package:// so you have to convert to model://, see https://github.com/ros-simulation/gazebo_ros_pkgs/pull/288 or use something like
<!-- push robot_description to factory and spawn robot in gazebo -->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model"
args="-z 1.0 -unpause -urdf -model robot -file /tmp/robot.gazebo.urdf -package_to_model" respawn="false" output="screen">
<param name="dummy_to_generate_gazebo_urdf_file"
command="rosrun xacro xacro.py -o /tmp/robot.gazebo.urdf $(arg model)" />
<param name="dummy_to_convert_package_to_model"
command="sed -i s@package://@model://@g /tmp/robot.gazebo.urdf" />
</node>
Original comment by Harmish Khambhaita (Bitbucket: harmishhk).
i am having similar problem for rendering baxter robot in gzweb. (as explained in this tutorial)
i cloned baxter_common from here, and added a model.config file inside baxter_description.
after executing following,
#!bash
source /usr/share/gazebo-5.0/setup.sh
export GAZEBO_MODEL_PATH=`rospack find baxter_common`:$GAZEBO_MODEL_PATH
cd /path/to/gzweb
./deploy.sh -m local
i get whole baxter_description directory copied to /path/to/gzweb/http/client/assets
the model renders just fine in gzclient but showing only few parts of the baxter robot in gzweb, as shown in the image belwo
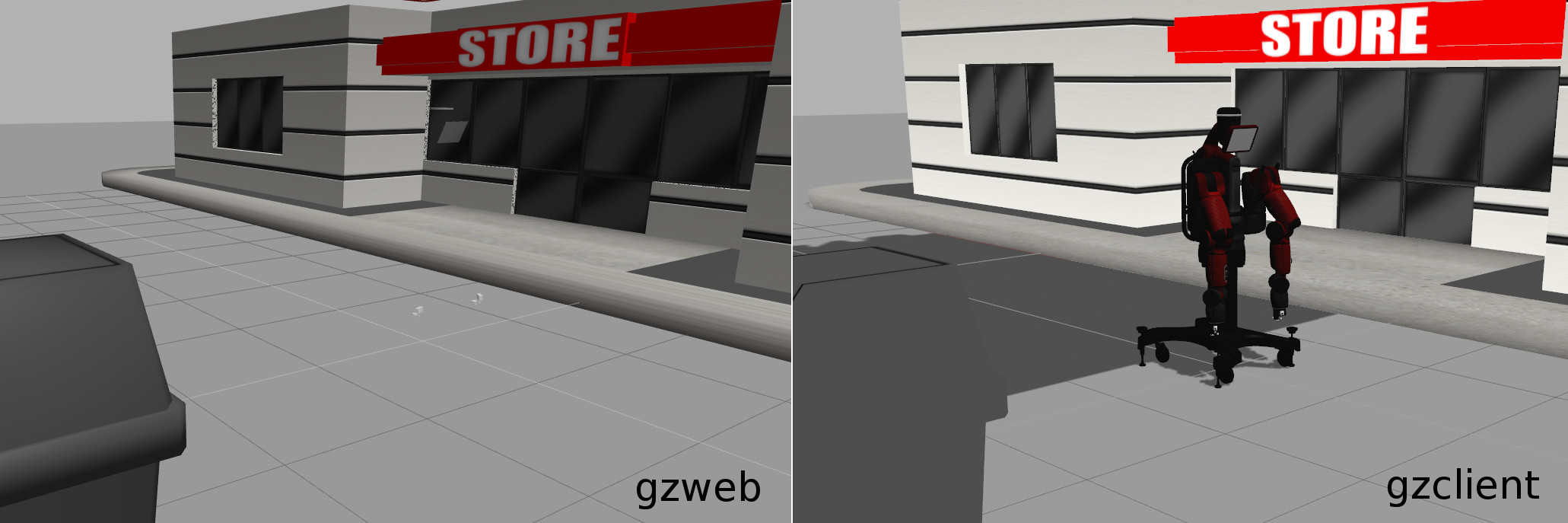
osrf-migration
commented
9 years ago Original comment by Ricardo Tellez (Bitbucket: TheConstruct).
Hey Harmish, it looks like your problem is exactly the same as the Yuki. Looking inside the baxter_description at the link you provided, I see that the urdf/baxter.urdf contains the tag package:// when defining the mesh filenames.
If you want to load the model into the gzweb, it should say model:// For that, you have two options: either you change manually package by model, or you use the option -package_to_model with the urdf_spawner (as indicated by Kei Okada).
Luck!
osrf-migration
commented
7 years ago Original comment by ahmed (Bitbucket: ahmedkhrifi).
i have a model with extension urdf,then i need to import this model to GazeboWeb!!
Original report (archived issue) by Yuki Furuta (Bitbucket: furushchev).
Hi, all!
I'm trying to run the tutorial of turtulebot_simulator ( http://wiki.ros.org/turtlebot_simulator ) using gzweb.
I could run the launch
roslaunch turtlebot_gazebo turtlebot_empty_world.launch, and I could see a turtlebot on gazebo sim.Then I executed
./start_gzweb.sh, and could see the ground of gazebo world, but no turtlebot has been found.I know that in order to use custom model on gzweb, local model has to be deployed. So, I executed some commands as follow:
After this, I checked that
turtlebot_descriptiondirectory has been copied tohttp/client/assetsfolder.How should I do next?