![]()
Packing Box 
Experimental toolkit for static detection of executable packing.
![]()
This Docker container is a CLI environment featuring a toolkit that gathers executable analyzers, packing detectors, packers and unpackers but also many tools for generating and manipulating datasets of packed and not-packed executables of different formats (including PE, ELF and Mach-O) for the sake of evaluating static detection techniques and tools, visualizing executables' layout and automating machine learning pipelines with the support of many algorithms.
See the Black Hat Arsenal presentations for demonstrations:
Here is what you can see when you start up the Docker container.
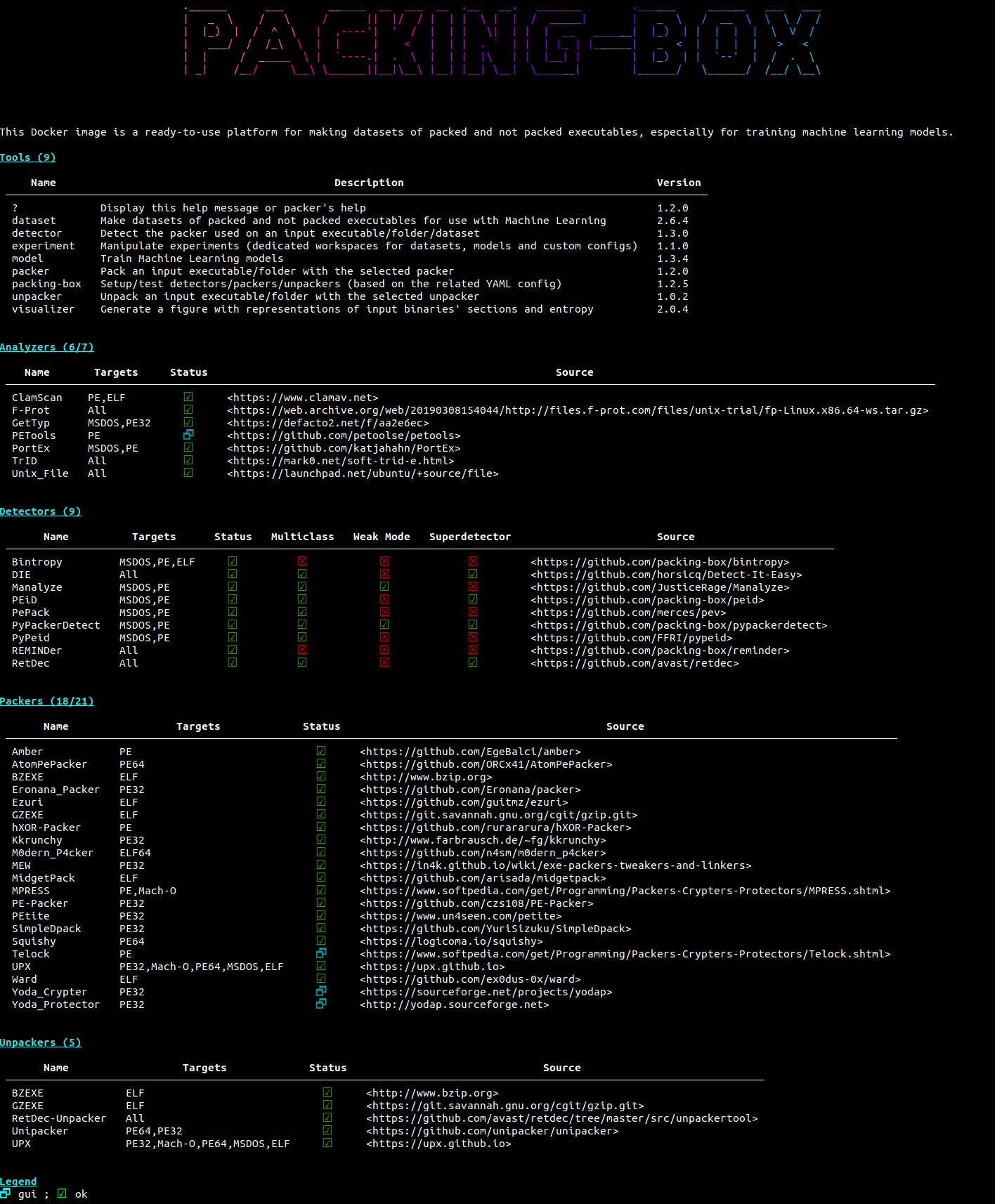
The various items integrated in the Packing-Box are defined in the very declarative and easy-to-use YAML format through different configuration files. This makes shaping the scope for evaluations and machine learning model training straightforward and practical for researchers.
:fast_forward: Quick Start
Building the image:
# docker build -t dhondta/packing-box .
[...]
<<<wait for a while>>>
[...]Starting it up with the current working directory mounted as /mnt/share in the container:
# docker run -it -h packing-box -v `pwd`:/mnt/share dhondta/packing-box
┌──[user@packing-box]──[/mnt/share]──────── ────[172.17.0.2]──[12:34:56]──[0.12]────
$ :clipboard: Basics
Items Usage
Items are configured through the YAML configuration files. They consist in:
analyzers.yml: utilities for analyzing files or more specifically packer tracedetectors.yml: tools for analyzing and deciding whether an executable is packed or notpackers.ymlandunpackers.yml: self-explanatory
From within the Packing-Box, the packing-box tool allows to setup and test items.
| Operation | Description | Command |
|---|---|---|
setup |
Setup an item from its YAML install definition |
# packing-box setup detector die |
test |
Test an item using a built-in set of test samples | # packing-box test packer upx |
Afterwards, items are available from the console.
$ die --help
<<snipped>>
$ upx --help
<<snipped>>Mass Packing & Detection
Packers and detectors have their respective dedicated tools for mass operations, packer and detector. They work either on a single file, a complete folder or a special dataset instance (as of the abstraction defined in the pbox package).
$ packer upx path/to/executables --prefix "upx_"
<<snipped>>For the detector tool, not selecting any detector will use those selected in detectors.yml as being part of the "superdetector". Moreover, the --binary option will consider whether the target executable is packed or not and not is precise packer.
$ detector path/to/single-executable -d die -d pypackerdetect
<<snipped>>
$ detector path/to/executables
<<snipped ; will use "superdetection">>
$ detector path/to/executables -d bintropy --binary
<<snipped ; in this case, as Bintropy only supports binary classification, --binary is necessary>>Learning Pipeline
Machine Learning models are fine-tuned through the YAML configuration files. They consist in:
algorithms.yml: the algorithms that are used with their static or dynamic parameters while training modelsfeatures.yml: the characteristics to be considered while training and using models
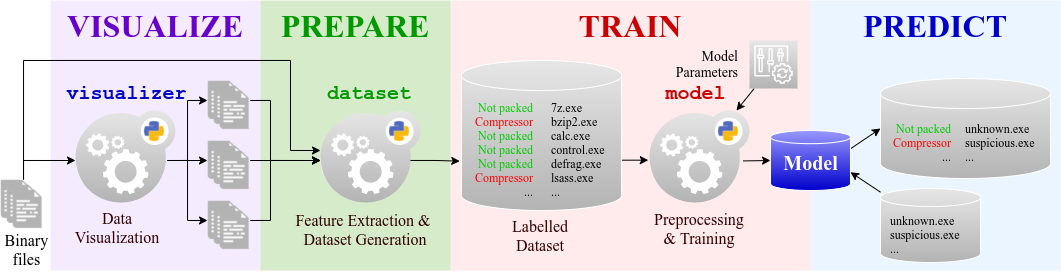
The PREPARE phase, especially feature engineering, is fine-tuned with the features YAML definition. Note that feature extraction is achieved with the pbox package of the Packing-Box while feature derivation and transformation is fine-tuned via the features YAML file.
The TRAIN phase is fine-tuned through the algorithms YAML file by setting the static and/or cross-validation parameters.
Dataset Manipulations
The PREPARE phase, especially dataset generation, is achieved with the dataset tool.
| Operation | Description | Command |
|---|---|---|
make  |
Make a new dataset, either fully packed or mixed with not-packed samples | # dataset make dataset -c PE -n 200 -s /path/to/pe |
merge  |
Merge two datasets | # dataset merge dataset dataset2 |
select  |
Select a subset of a dataset to create a new one | # dataset select dataset dataset2 -q "format == 'PE32'" |
update  |
Update a dataset with new samples given their labels | # dataset update dataset -l labels.json -s folder-of-executables |
Data Visualization
The VISUALIZE phase can be performed with the dataset and visualizer tools.
In order to visualize feature values:
$ dataset plot test-mix byte_0_after_ep byte_1_after_ep --multiclass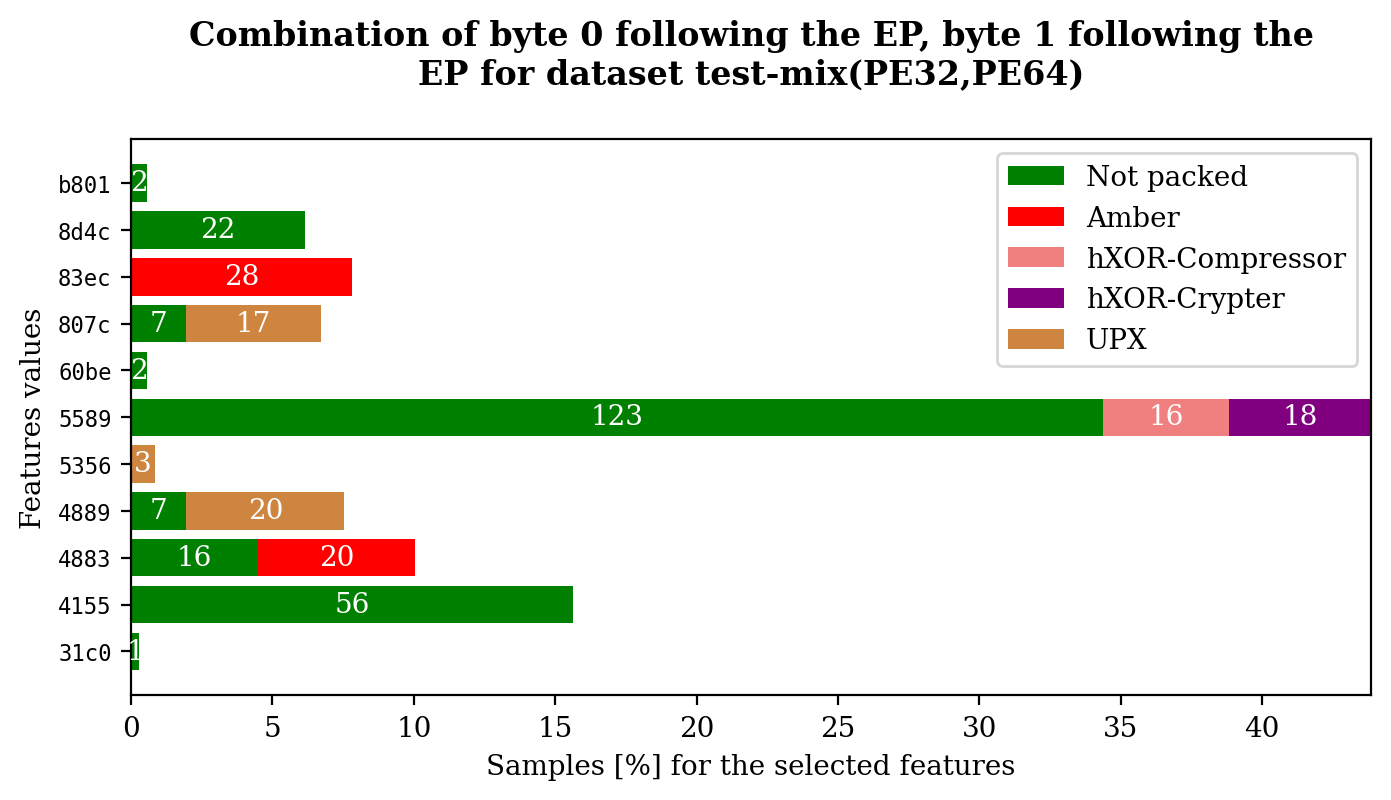
In order to visualize samples (aims to compare the not-packed and some packed versions):
$ visualizer plot "PsExec.exe$" dataset -s -l not-packed -l MEW -l RLPack -l UPX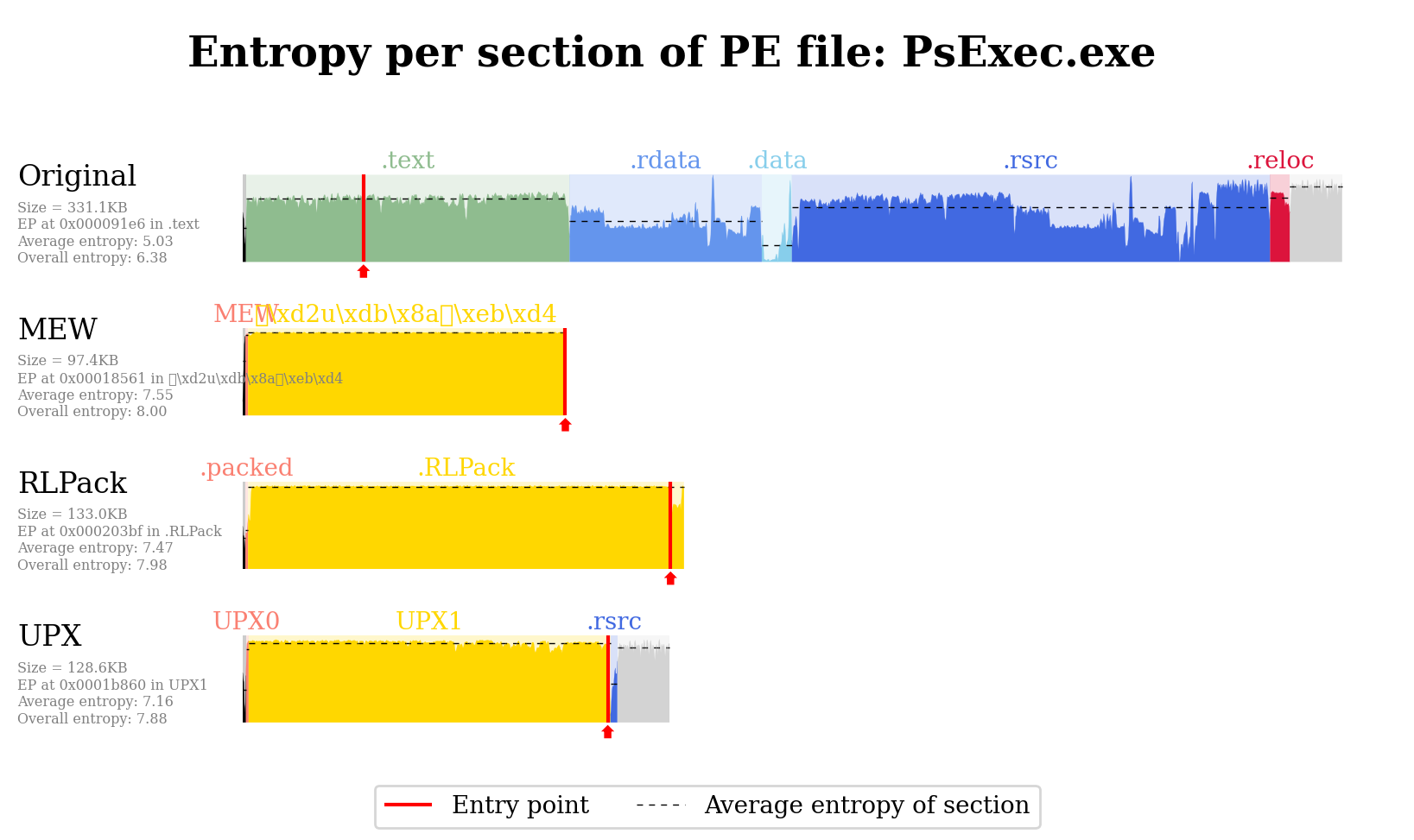
This will work for instance for a structure formatted as such:
folder/
+-- not-packed/PsExec.exe
+-- packed
+-- MEW/mew_PsExec.exe
+-- RLPack/rlpack_PsExec.exe
+-- UPX/upx_PsExec.exeModel Manipulations
The TRAIN and PREDICT phases of the pipeline are achieved with the model tool.
| Operation | Description | Command |
|---|---|---|
compare 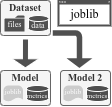 |
Compare the performance metrics of multiple models | # model compare model --dataset dataset --model model2 |
test 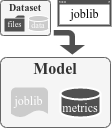 |
Test a model on a given dataset | # model test model --name dataset |
train  |
Train a model given an algorithm and input dataset | # model train dataset --algorithm dt |
:star: Related Projects
You may also like these:
- Awesome Executable Packing: A curated list of awesome resources related to executable packing.
- Bintropy: Analysis tool for estimating the likelihood that a binary contains compressed or encrypted bytes (inspired from this paper).
- Dataset of packed ELF files: Dataset of ELF samples packed with many different packers.
- Dataset of packed PE files: Dataset of PE samples packed with many different packers (fork of this repository).
- DSFF: Library implementing the DataSet File Format (DSFF).
- PEiD: Python implementation of the well-known Packed Executable iDentifier (PEiD).
- PyPackerDetect: Packing detection tool for PE files (fork of this repository).
- REMINDer: Packing detector using a simple heuristic (inspired from this paper).
:books: Related Readings
- arXiv - Experimental Toolkit for Manipulating Executable Packing
- Black Hat Arsenal EU 2022 - Packing-Box: Playing with Executable Packing
- Black Hat Arsenal EU 2023 - Packing-Box: Breaking Detectors & Visualizing Packing
- Medium Blog Post - Unpacking the Potential of "Packing Box"