OpenNI2/NiTE2 Python Bindings
Python bindings for OpenNI2 and NiTE2.
Based on Primesense original bindings, with the bugs (well, at least some of them) fixed.
Example of NiTE2 usage:
import sys
from openni import openni2, nite2, utils
openni2.initialize()
nite2.initialize()
dev = openni2.Device.open_any()
try:
userTracker = nite2.UserTracker(dev)
except utils.NiteError as ne:
logger.error("Unable to start the NiTE human tracker. Check "
"the error messages in the console. Model data "
"(s.dat, h.dat...) might be inaccessible.")
sys.exit(-1)
while True:
frame = userTracker.read_frame()
if frame.users:
for user in frame.users:
if user.is_new():
print("New human detected! Calibrating...")
userTracker.start_skeleton_tracking(user.id)
elif user.skeleton.state == nite2.SkeletonState.NITE_SKELETON_TRACKED:
head = user.skeleton.joints[nite2.JointType.NITE_JOINT_HEAD]
confidence = head.positionConfidence
print("Head: (x:%dmm, y:%dmm, z:%dmm), confidence: %.2f" % (
head.position.x,
head.position.y,
head.position.z,
confidence))
nite2.unload()
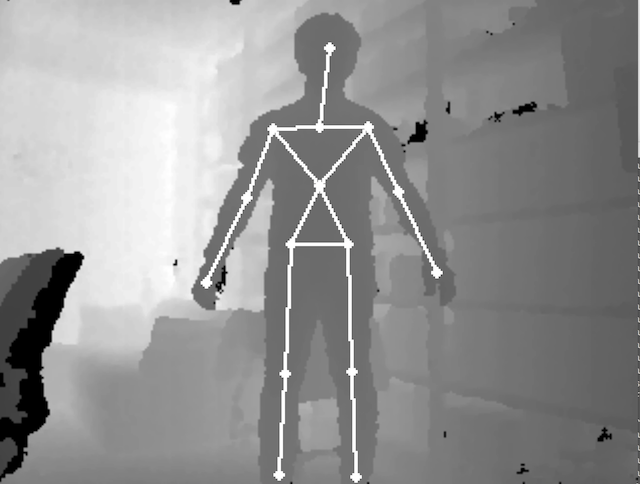
openni2.unload()Another example of NiTE2. Display skeletons over the depth stream.
import sys
import argparse
from openni import openni2, nite2, utils
import numpy as np
import cv2
GRAY_COLOR = (64, 64, 64)
CAPTURE_SIZE_KINECT = (512, 424)
CAPTURE_SIZE_OTHERS = (640, 480)
def parse_arg():
parser = argparse.ArgumentParser(description='Test OpenNI2 and NiTE2.')
parser.add_argument('-w', '--window_width', type=int, default=1024,
help='Specify the window width.')
return parser.parse_args()
def draw_limb(img, ut, j1, j2, col):
(x1, y1) = ut.convert_joint_coordinates_to_depth(j1.position.x, j1.position.y, j1.position.z)
(x2, y2) = ut.convert_joint_coordinates_to_depth(j2.position.x, j2.position.y, j2.position.z)
if (0.4 < j1.positionConfidence and 0.4 < j2.positionConfidence):
c = GRAY_COLOR if (j1.positionConfidence < 1.0 or j2.positionConfidence < 1.0) else col
cv2.line(img, (int(x1), int(y1)), (int(x2), int(y2)), c, 1)
c = GRAY_COLOR if (j1.positionConfidence < 1.0) else col
cv2.circle(img, (int(x1), int(y1)), 2, c, -1)
c = GRAY_COLOR if (j2.positionConfidence < 1.0) else col
cv2.circle(img, (int(x2), int(y2)), 2, c, -1)
def draw_skeleton(img, ut, user, col):
for idx1, idx2 in [(nite2.JointType.NITE_JOINT_HEAD, nite2.JointType.NITE_JOINT_NECK),
# upper body
(nite2.JointType.NITE_JOINT_NECK, nite2.JointType.NITE_JOINT_LEFT_SHOULDER),
(nite2.JointType.NITE_JOINT_LEFT_SHOULDER, nite2.JointType.NITE_JOINT_TORSO),
(nite2.JointType.NITE_JOINT_TORSO, nite2.JointType.NITE_JOINT_RIGHT_SHOULDER),
(nite2.JointType.NITE_JOINT_RIGHT_SHOULDER, nite2.JointType.NITE_JOINT_NECK),
# left hand
(nite2.JointType.NITE_JOINT_LEFT_HAND, nite2.JointType.NITE_JOINT_LEFT_ELBOW),
(nite2.JointType.NITE_JOINT_LEFT_ELBOW, nite2.JointType.NITE_JOINT_LEFT_SHOULDER),
# right hand
(nite2.JointType.NITE_JOINT_RIGHT_HAND, nite2.JointType.NITE_JOINT_RIGHT_ELBOW),
(nite2.JointType.NITE_JOINT_RIGHT_ELBOW, nite2.JointType.NITE_JOINT_RIGHT_SHOULDER),
# lower body
(nite2.JointType.NITE_JOINT_TORSO, nite2.JointType.NITE_JOINT_LEFT_HIP),
(nite2.JointType.NITE_JOINT_LEFT_HIP, nite2.JointType.NITE_JOINT_RIGHT_HIP),
(nite2.JointType.NITE_JOINT_RIGHT_HIP, nite2.JointType.NITE_JOINT_TORSO),
# left leg
(nite2.JointType.NITE_JOINT_LEFT_FOOT, nite2.JointType.NITE_JOINT_LEFT_KNEE),
(nite2.JointType.NITE_JOINT_LEFT_KNEE, nite2.JointType.NITE_JOINT_LEFT_HIP),
# right leg
(nite2.JointType.NITE_JOINT_RIGHT_FOOT, nite2.JointType.NITE_JOINT_RIGHT_KNEE),
(nite2.JointType.NITE_JOINT_RIGHT_KNEE, nite2.JointType.NITE_JOINT_RIGHT_HIP)]:
draw_limb(img, ut, user.skeleton.joints[idx1], user.skeleton.joints[idx2], col)
# -------------------------------------------------------------
# main program from here
# -------------------------------------------------------------
def init_capture_device():
openni2.initialize()
nite2.initialize()
return openni2.Device.open_any()
def close_capture_device():
nite2.unload()
openni2.unload()
def capture_skeleton():
args = parse_arg()
dev = init_capture_device()
dev_name = dev.get_device_info().name.decode('UTF-8')
print("Device Name: {}".format(dev_name))
use_kinect = False
if dev_name == 'Kinect':
use_kinect = True
print('using Kinect.')
try:
user_tracker = nite2.UserTracker(dev)
except utils.NiteError:
print("Unable to start the NiTE human tracker. Check "
"the error messages in the console. Model data "
"(s.dat, h.dat...) might be inaccessible.")
sys.exit(-1)
(img_w, img_h) = CAPTURE_SIZE_KINECT if use_kinect else CAPTURE_SIZE_OTHERS
win_w = args.window_width
win_h = int(img_h * win_w / img_w)
while True:
ut_frame = user_tracker.read_frame()
depth_frame = ut_frame.get_depth_frame()
depth_frame_data = depth_frame.get_buffer_as_uint16()
img = np.ndarray((depth_frame.height, depth_frame.width), dtype=np.uint16,
buffer=depth_frame_data).astype(np.float32)
if use_kinect:
img = img[0:img_h, 0:img_w]
(min_val, max_val, min_loc, max_loc) = cv2.minMaxLoc(img)
if (min_val < max_val):
img = (img - min_val) / (max_val - min_val)
img = cv2.cvtColor(img, cv2.COLOR_GRAY2RGB)
if ut_frame.users:
for user in ut_frame.users:
if user.is_new():
print("new human id:{} detected.".format(user.id))
user_tracker.start_skeleton_tracking(user.id)
elif (user.state == nite2.UserState.NITE_USER_STATE_VISIBLE and
user.skeleton.state == nite2.SkeletonState.NITE_SKELETON_TRACKED):
draw_skeleton(img, user_tracker, user, (255, 0, 0))
cv2.imshow("Depth", cv2.resize(img, (win_w, win_h)))
if (cv2.waitKey(1) & 0xFF == ord('q')):
break
close_capture_device()
if __name__ == '__main__':
capture_skeleton()