 JesusArellano00
commented
2 years ago
JesusArellano00
commented
2 years ago 
Closed JesusArellano00 closed 1 year ago
JesusArellano00
commented
2 years ago
JesusArellano00
commented
2 years ago 
JesusArellano00
commented
2 years ago 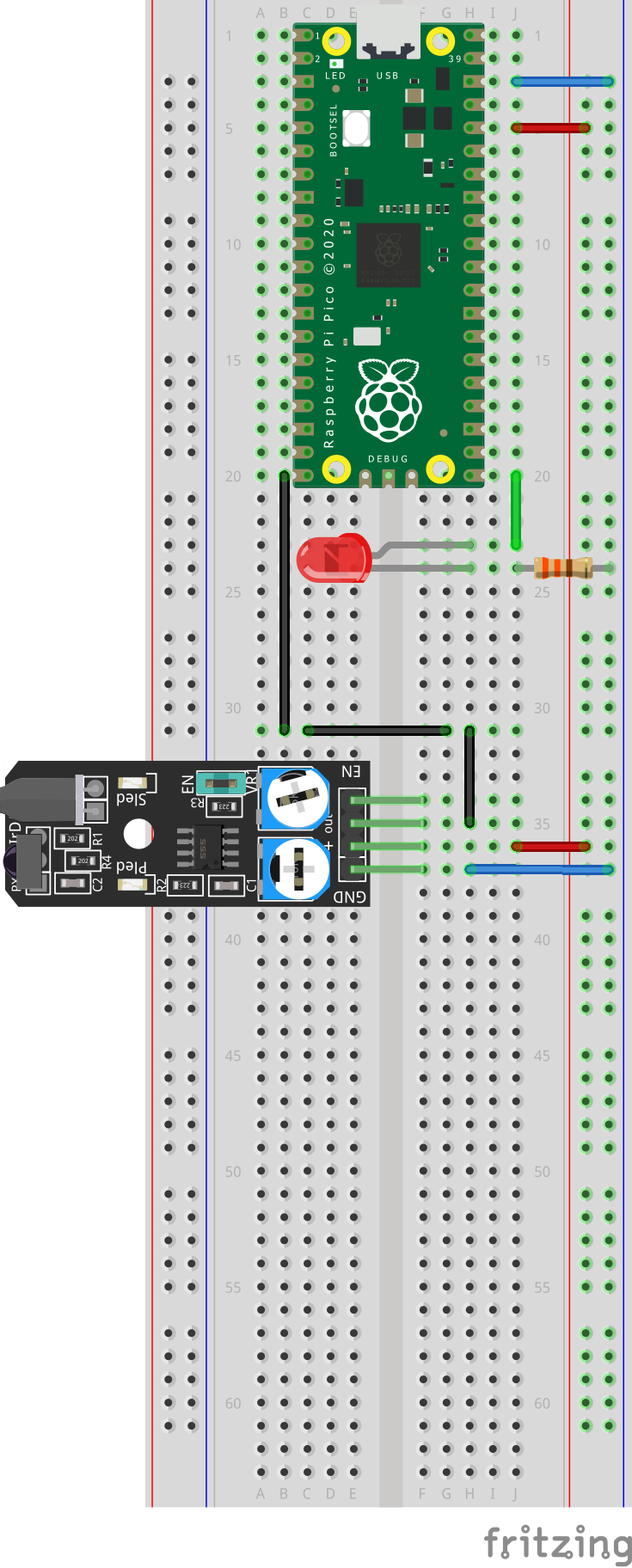
| Raspberry Pi Pico | Sensor (KY-032) |
|---|---|
| - | EN (Enable) |
| 3V3(OUT) | + (+V) |
| GND | GND |
| GP15/SPI1_TX/I2C_SCL | OUT (Signal) |
JesusArellano00
commented
2 years ago El programa lee el estado actual del pin del sensor y emite en la consola en serie si el detector de obstáculos se encuentra actualmente frente a un obstáculo o no.
# Se importan los pines y utime.
from machine import Pin
import utime
# Conectamos los pines del Raspberry al sensor y al led. Y los configuramos
led = Pin(16, Pin.OUT)
sensor = Pin(15, Pin.IN)
# Con este loop estaremos detectando si hay un obstaculo o no
while True:
# Con estás lineas imprimimos el valor del sensor (0 o 1)
print(sensor.value())
utime.sleep_ms(20)
# Con el if decidimos si se prende el led o no, segun el valor del sensor
if sensor.value() == 1:
led.value(0)
else:
led.value(1)Readme en la carpeta de PYTHON https://github.com/tectijuana/sensores/tree/master/PYTHON/KY-032_Avoidance
JesusArellano00
commented
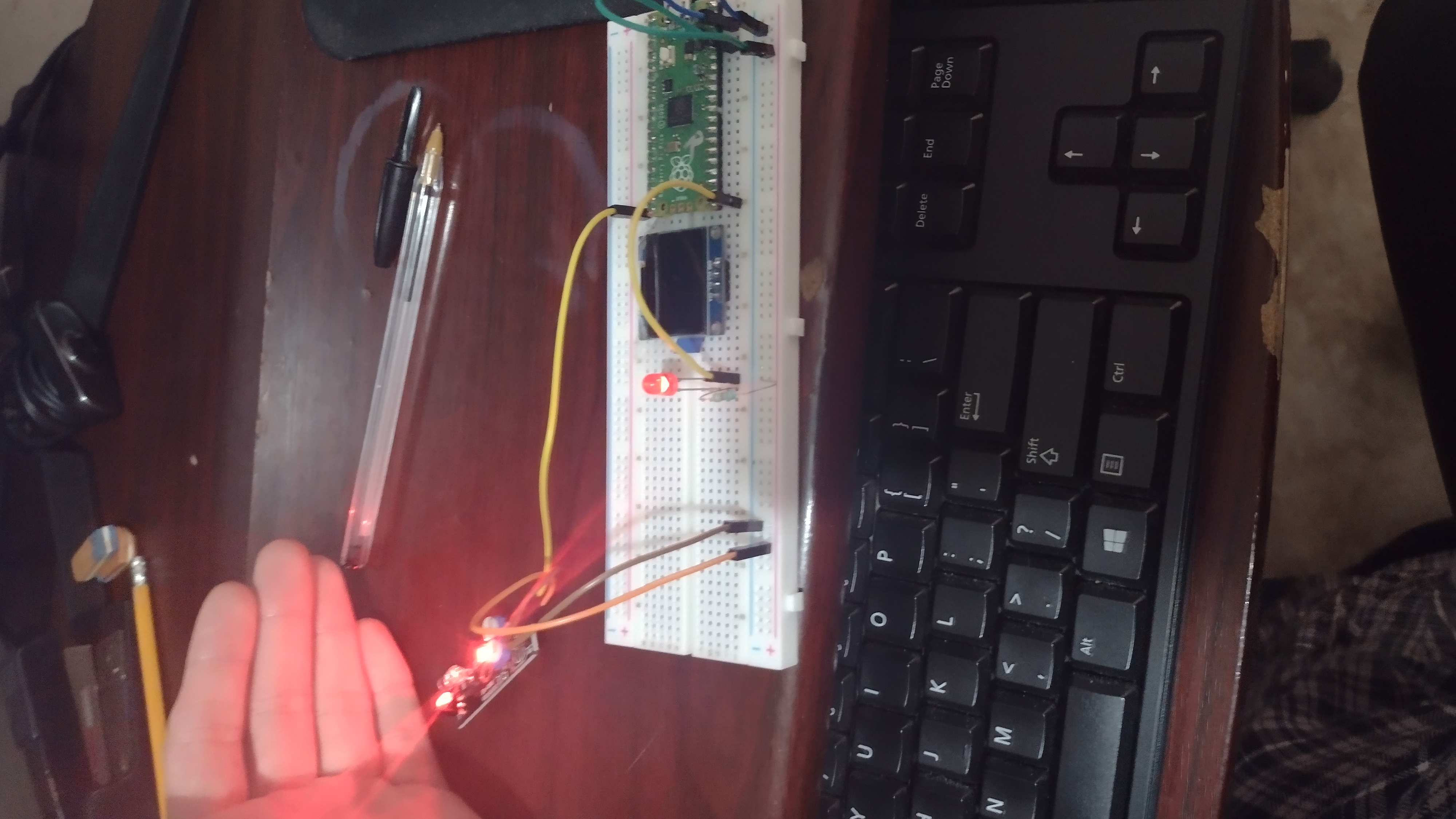
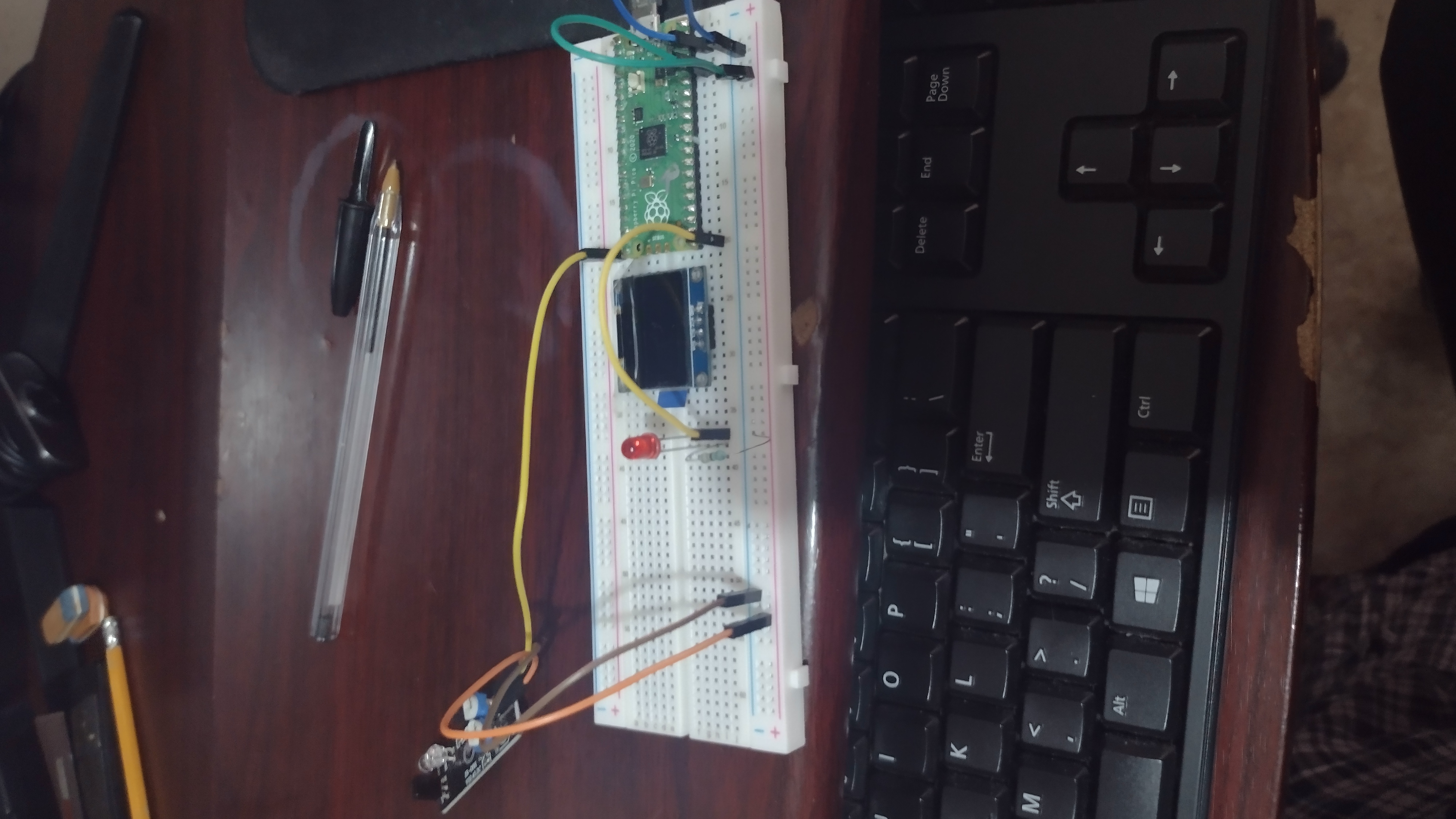
2 years ago Se muestran imágenes del funcionamiento del circuito.
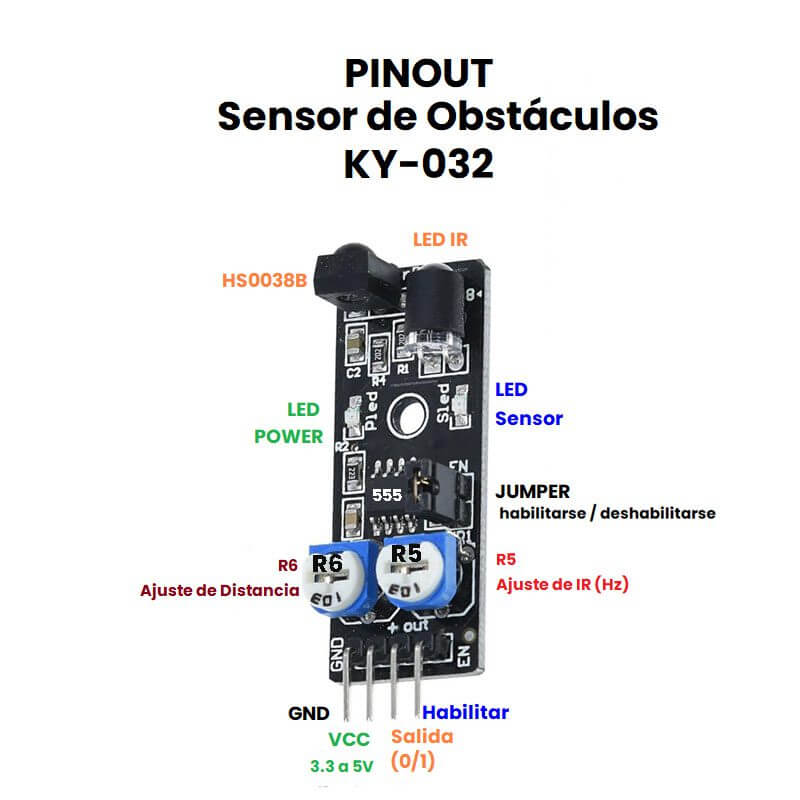
Sensor de detección de obstáculos KY-032