PyLIS
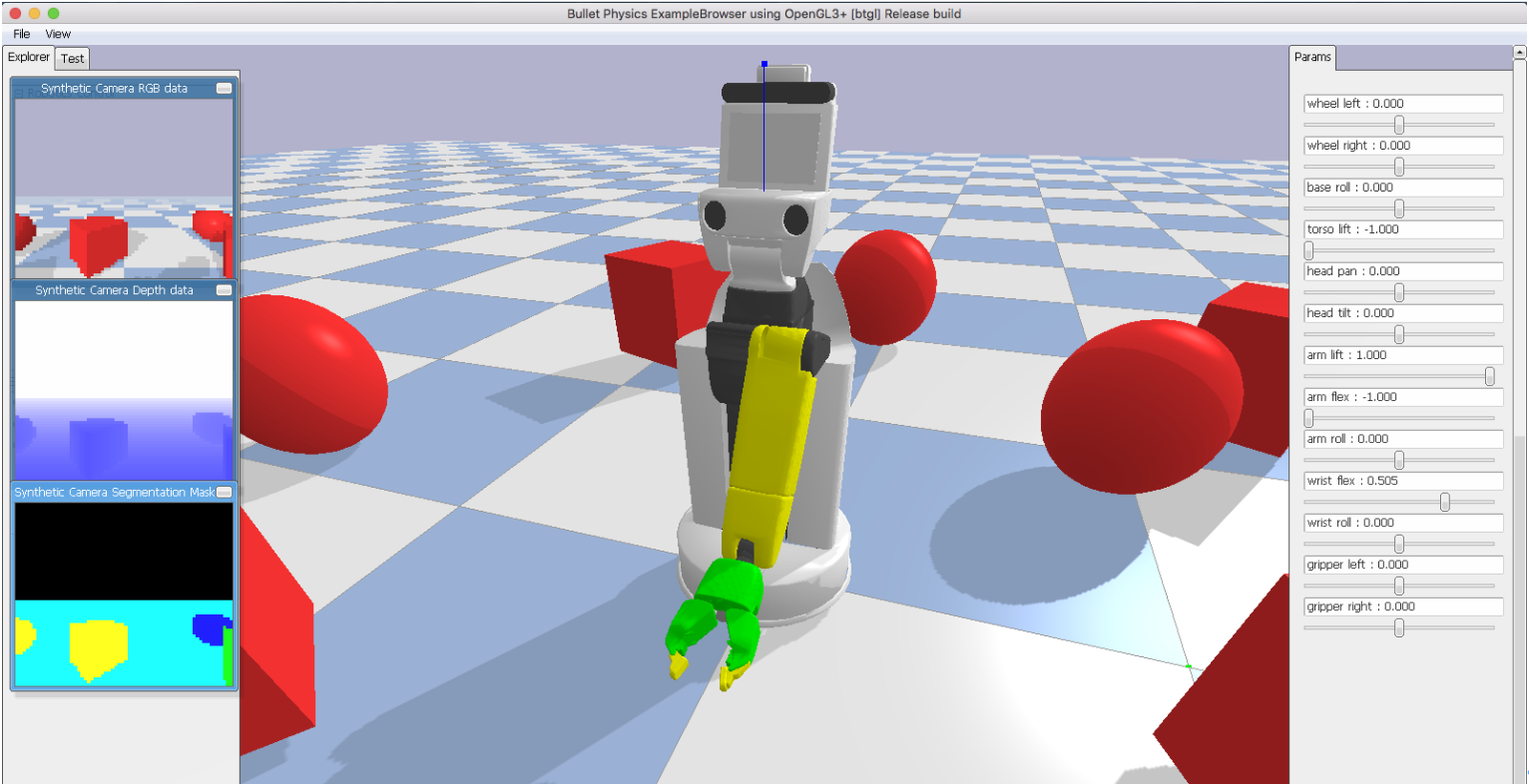
PyLIS (Life in Silico with PyBullet) is a 3D simulation environment for research in human level artificial intelligence (HLAI) and artificial general intelligence (AGI). PyLIS includes agent (robot) models with wheels for locomotion and a manipulator; more specifically:
- Software library for:
- reading robot models into the virtual 3D space with a physics engine
- obtaining color images and depth images from the head camera
- moving by wheels
- manipulating objects with a manipulator
- detecting collision with other objects
- A sample environment and agents to perform reinforcement learning with the library.
PyLIS can be used in research involving both manipulation and locomotion capabilities. The combination of manipulation and locomotion in tasks makes them much more complex than cases where those capabilities are tested separately (because of its expanded search space).
PyLIS can also be used for research in social interaction with object manipulation/operation with more than one agent, including research in acquisition of language involving object expressions.
See wiki for more details.
Demo Videos
Click on thumbnail to play youtube video.
Manipulator Demo
Locomotion Demo

Reinforcement Learning Demo

Available Environments
Food Hunting
Links
WBAI's Request for Reseach: 3D Agent Test Suites
OpenAI Gym
Bullet Real-Time Physics Simulation
- https://pybullet.org/
- https://docs.google.com/document/d/10sXEhzFRSnvFcl3XxNGhnD4N2SedqwdAvK3dsihxVUA/edit
- https://github.com/bulletphysics/bullet3
Stable Baselines3
Robot models
This repository supports these robot models.
Toyota HSR by TRI
URDF robot models for Toyota HSR by TRI.
3D Mesh files for Toyota HSR by TRI.
R2D2 by Bullet Physics
Bullet Physics SDK.
Acknowledgment
This work was supported by MEXT KAKENHI Grant Number 17H06308, Grant-in-Aid for Scientific Research on Innovative Areas, Brain information dynamics underlying multi-area interconnectivity and parallel processing.
Author
Susumu OTA