-
Hello,
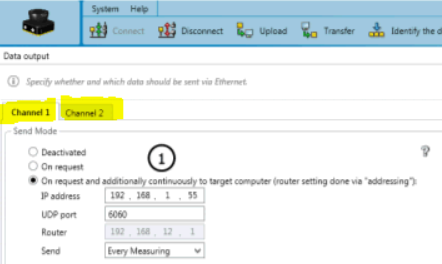
the nanoScan offers 2 channels to provide measurement data to 2 targets.
…
-
Hello,
with the current driver I could not acquire scan data from two microScans3 at two receivers.
Please, refer to the attached pptx for more detailled description.
[LiDAR-LOC_ROS_test.pp…
-
ubuntu20.04,kernel:5.10,ros:noetic,sick_driver:1.0.8,node crashed
-
When building the library with Clang instead of gcc, following errors are raised.
``` bash
/sick/sick_safetyscanners_base/src/SickSafetyscanners.cpp:54:7: error: moving a temporary object prevents…
-
sick_safetyscanners ros package version: 1.0.8
When `field_data` service is called while communication with LiDAR sensor is established, we observed the case that the ros node caused segfault.
H…
-
I have followed the directions and am able to connect and communicate with the sensor. I can send a findSensor API command, and I can see the MicroScan 3 blink multicolor lights in response. However, …
-
Hello,
in reconfigureCallback function in the ros node
`
if (config.angle_start == config.angle_end)
{
m_communication_settings.setStartAngle(sick::radToDeg(0));
m_communication…
-
this might be connected with #48
The response to the /field_data service contains for each field:
```
ranges: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.069000005722046, 1.069000005722046, 1.06900000572204…
-
Hi,
would it be possible to trigger another release.
For me the main reason is to have commit https://github.com/SICKAG/sick_safetyscanners/commit/cfa456e78af42b82c1031354864837a798add4a7
to be abl…
-
Hello everyone !
Wish you a great day,
I would like to ask for a way to use sick_safetyscanners to get data microScan3. Currently, I am using C# on Windows to work with microScan3. Is it possib…