-
Hi,
I'm observing strange buffering + freezing behaviour in motor control with DS402.
We have 8 motors, 4 in velocity mode (mode 2), and 4 in cyclic synchronous position or profiled position mo…
-
Hello @jamwaffles
I was working on a benchmark of `ethercrab` vs `ethercat-rs` as we mentioned, and I've found useful the following piece of API. I didn't fully implemented it due to some difficul…
-
I started getting a strange runtime error after adding a new object. The error I get is this:
```
System.ArgumentException: Grid has only 67 columns, you tried to insert cell into position 2;67.Yo…
-
Hello there
Thanks for all the work done here
I am an engineer in robotics and software engineering and I'm developing a robot arm with ethercat enabled servodrives that will be directly controlle…
-
Hello
This may be the first of a serie of stupid interogations for setting up a master using CoE
I'm trying to start a cyclic communication with PDO read/write on an omron servodrive (R88D-1SN04H-…
-
Hello everyone, i'm not expert with EtherCAT.
I've managed to launch drive by executing Elmo legacy commands JV(PA) and BG (e. g. JV=111111: ec_SDOwrite(slave, 0x30ff, 0x01, FALSE, 4, 111111, TIMEO…
-
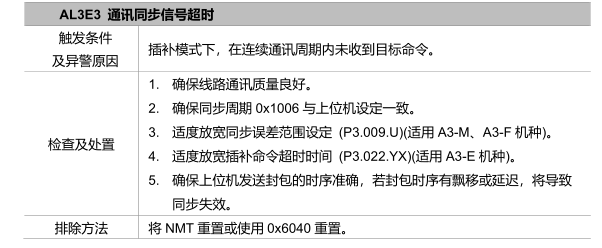
# DS402中插补位置模式( Interpolation Position Mode)如何实现?
## 配置后进入插补模式,电机报警。
报警原因:通讯同步信号超时
…
-
### 例如以下代码,目前是使用延时执行下一步
```c
Controlword = CONTROL_WORD_SHUTDOWN;
SYNC_DELAY;
Controlword = CONTROL_WORD_SWITCH_ON;
SYNC_DELAY;
Controlword = CONTROL_WORD_ENABLE_OPERATION;
```
这样无法判断命令…
-
Hello.
I am using red_test example and getting wkc of 2.
This is the stdout:
1 slaves found and configured.
Slave:1 Name:TQ870 Output size: 64bits Input size:152bits State: 4 delay:0.1
…
-
Hello,
I recently stumbled into an issue. I was using the version 1.2.1 of this library on my computer and it runnned perfectly. Then I run my code into a new one. On the new computer, I wasn't abl…