Isaac ROS Compression
NVIDIA-accelerated data compression.
Overview
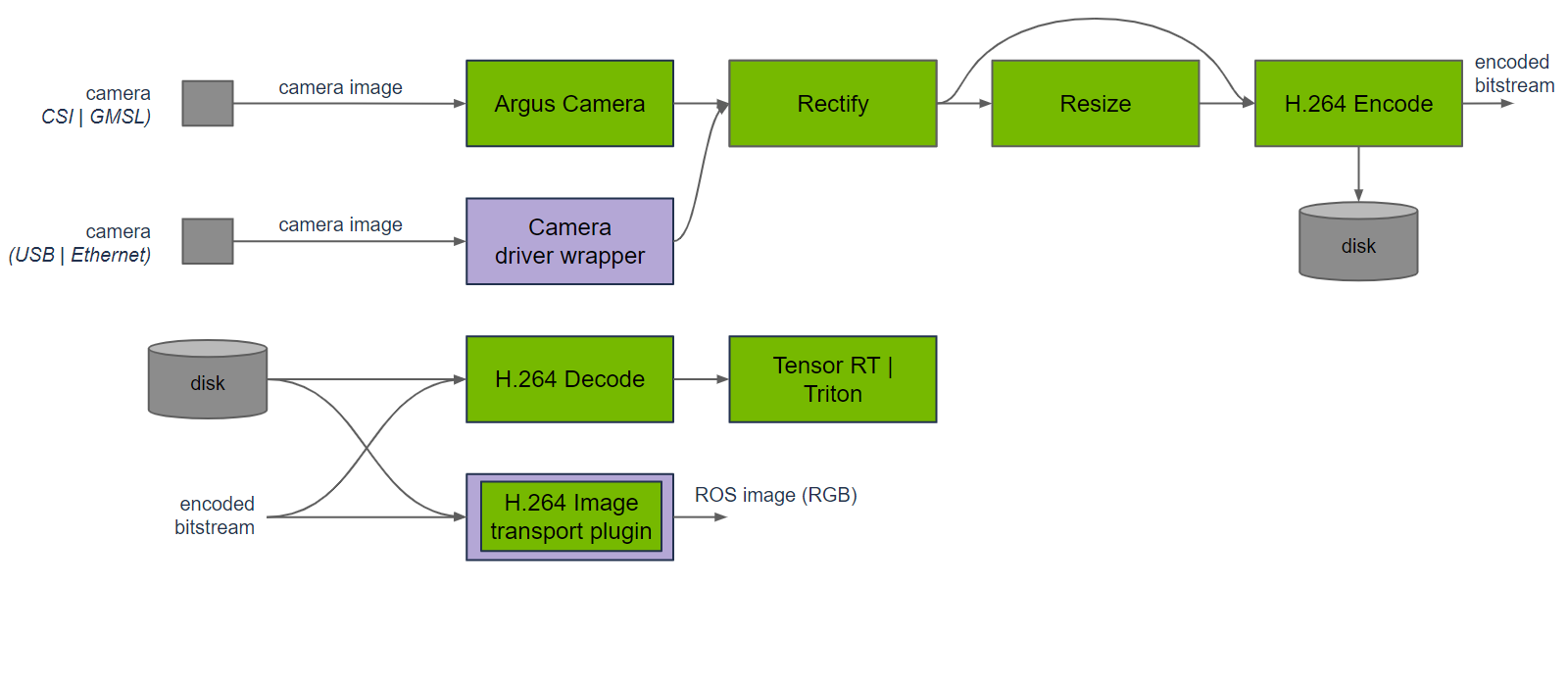
Isaac ROS Compression provides H.264 image encoder
and decoder that leverages the specialized hardware in NVIDIA GPUs and the
Jetson platform.
The isaac_ros_h264_encoder package can compress an image into H.264
data using the NVENC. The
isaac_ros_h264_decoder package can decode the H.264 data into
original images using the NVDEC.
Image compression reduces the data footprint of images when written to storage or transmitted between computers. A 1080p camera at 30fps produces 177MB/s of data; image compression reduces this by approximately 10 times to 17MB/s of data, reducing the throughput needed to send this to another computer or write out to storage; a one minute 1080p camera recording is reduced from ~10GB to ~1GB. This compression is provided by dedicated NVIDIA acceleration (NvEnc) separate from other hardware engines such as the GPU.
A common use case for image compression during the development of robots is to capture camera images to storage. This captured data is processed offline from the robot to produce training datasets for AI models, test datasets for perception functions, and test data for open-loop re-simulation of software in development with real data. The compression parameters are tuned to minimize visual quality reduction from lossy compression for AI model and perception function development. Compression reduces the amount of data written to storage, the time required to offload the recording, and footprint of the data at rest in a data lake.
Compression can be used with event data recorders to capture camera images to storage when an event of interest occurs, often due to failures on the robot. This provides visual information to assist in the debugging of the event or to improve perception and robot functions.
H.264 is an
efficient and popular compression algorithm with broad support across
many platforms. The output of the isaac_ros_h264_encoder package can then
be decoded with NVIDIA acceleration using the
isaac_ros_h264_decoder on Jetson and x86_64 systems, or by
third-party H.264 decoder packages on non-NVIDIA platforms.
This package is powered by NVIDIA Isaac Transport for ROS (NITROS), which leverages type adaptation and negotiation to optimize message formats and dramatically accelerate communication between participating nodes.
[!Note] ROS 2 relies on
image_transport_pluginsfor CPU based compression. We recommend usingisaac_ros_h264_encoderas part of the graph of nodes when capturing to a rosbag for performance benefits of NITROS; ROS 2 type adaptation used by NITROS is not supported byimage_transport_plugins, resulting in more CPU load, and less encode performance.
Performance
| Sample Graph |
Input Size |
AGX Orin |
x86_64 w/ RTX 4060 Ti |
|---|---|---|---|
| H.264 Decoder Node |
1080p |
198 fps 8.1 ms @ 30Hz |
596 fps 3.8 ms @ 30Hz |
| H.264 Encoder Node I-frame Support |
1080p |
406 fps 12 ms @ 30Hz |
425 fps 3.3 ms @ 30Hz |
| H.264 Encoder Node P-frame Support |
1080p |
473 fps 9.1 ms @ 30Hz |
596 fps 2.3 ms @ 30Hz |
Documentation
Please visit the Isaac ROS Documentation to learn how to use this repository.
Packages
Latest
Update 2024-09-26: Update for ZED compatibility