Open3DSG: Open-Vocabulary 3D Scene Graphs from Point Clouds with Queryable Objects and Open-Set Relationships
Sebastian Koch
·
Narunas Vaskevicius
·
Mirco Colosi
Pedro Hermosilla
·
Timo Ropinski
CVPR 2024
Paper | Project Page
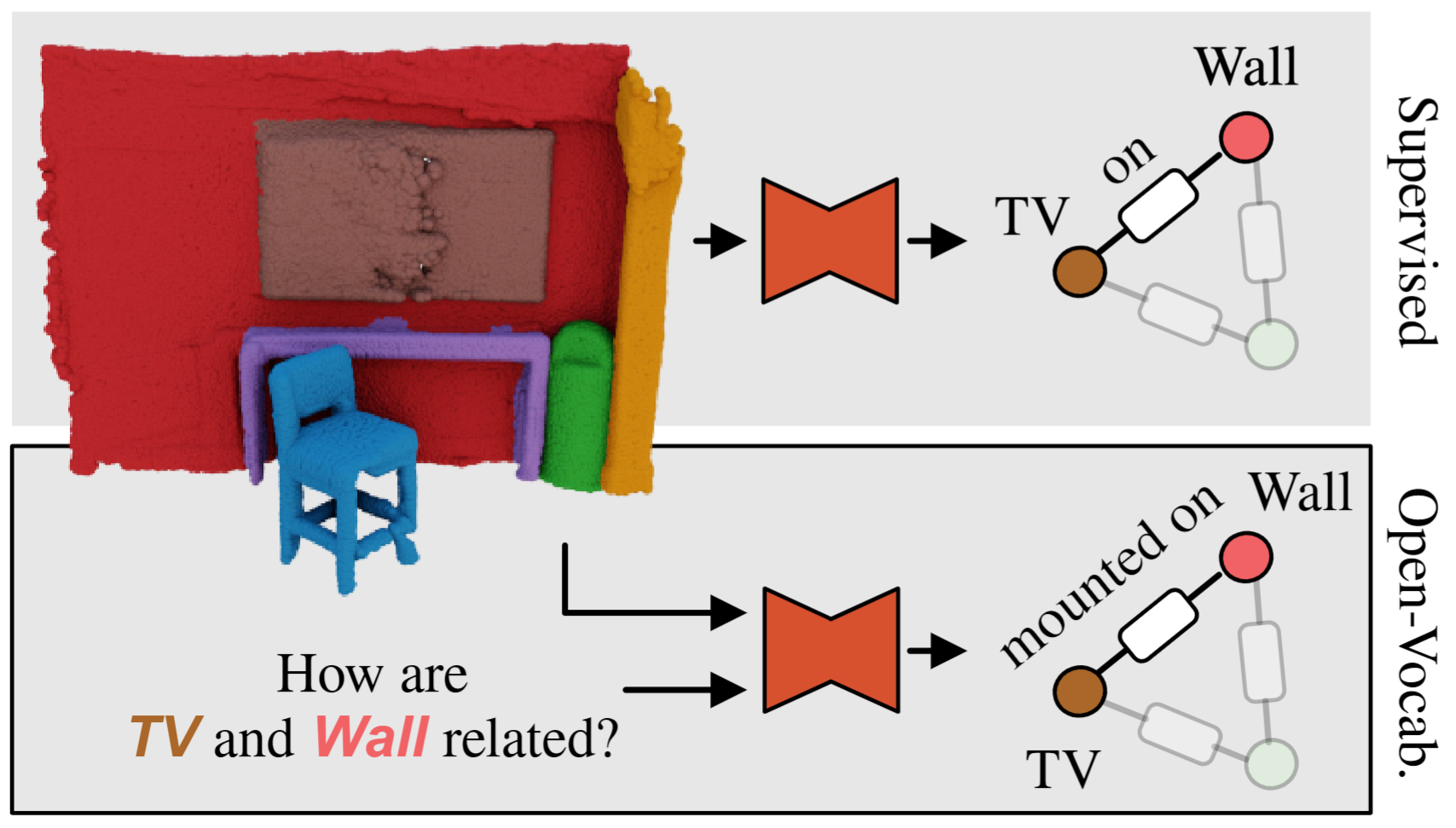
We present Open3DSG the first approach for learning to predict open-vocabulary 3D scene graphs from 3D point clouds. The advantage of our method is that it can be queried and prompted for any instance in the scene, such as the TV and Wall, to predict fine-grained semantic descriptions of objects and relationships.
Setup
conda env create --name open3dsg python=3.9
conda install pytorch==2.0.1 torchvision==0.15.2 torchaudio==2.0.2 pytorch-cuda=11.8 -c pytorch -c nvidia
pip install -r requirements.txt
pip install -e .Note: This software is tested and developed for CUDA 11.8 & tested with an NVIDIA V100 32GB.
Data Preparation
- Download 3RScan and 3DSSG. Unpack the image sequences for each scan. And include the 3DSSG files as a subdirectory in 3RScan.
- Download ScanNet and split the scans into
scannet_2dandscannet_3d. We use the pre-processed data from ScanNet ETH preprocessed 3D & ScanNet ETH preprocessed 2D, when using the pre-processed version make sure that you have acknowledged the ScanNet license. When using processed ScanNet ETH preprocessed 2D frames, use the matching intrinsics. - Download the 3DSSG_subset.zip and extract the files in the 3RScan directory for training and evaluation. Additional meta files can be found here.
- Download 3RScan & ScanNet meta data files using
scripts/download_scannet_meta.shandscripts/download_scannet_meta.shand place them in their data directories. - Set the path to your data in
config/config.py
Data Preprocessing
3DSSG provides pre-constructed scene graphs with ground-truth labels for training and validation. ScanNet does not. To train our model on ScanNet, we first have to build up a similar graph structure for ScanNet. You can use the following command to generate the graphs for ScanNet
python open3dsg/data/gen_scannet_subgraphs.py --type [train/test/validation]For the 2D-3D distillation training, we have to align the 2D frames to the 3D point clouds. Using this script we generate matching frames for each 3D instance.
python open3dsg/data/get_object_frame.py --mode [train/test] --dataset [R3SCAN/SCANNET]We pre-process the data before the training for faster data processing in the training loop.
python open3dsg/data/preprocess_3rscan.py
python open3dsg/data/preprocess_scannet.pyThe pre-processed features can be used directly for training and testing.
Model Downloads
Download the OpenSeg Checkpoint, BLIP2 Positional Embedding & pre-trained PointNet/PointNet2 weights and put them the checkpoints directory selected in the config file.
Precompute 2D features
This is an optional step to accelerate the forward pass in the training loop. This command will dump the VLM features for each training sample to disk. Storing the features requires about 300GB per dataset.
python open3dsg/scripts/run.py --dump_features --dataset [scannet/3rscan] --scales 3 --top_k_frames 5 --clip_model OpenSeg --blipIn case of out of memory issues, seperate the BLIP export & the OpenSeg export.
Train
To train Open3DSG on ScanNet you can use:
python open3dsg/scripts/run.py --epochs 100 --batch_size 4 --gpus 4 --workers 8 --use_rgb --dataset scannet --clip_model OpenSeg --blip --load_features [path to precomputed 2D features]Change hyperparameters according to you hardware availability. In run.py you can find more model and data hyperparameters.
Use --mixed_precision to optimize GPU memory during training.
Test
To evaluate a trained model on the 3RSCAN dataset with ground-truth labels, use the following command:
python open3dsg/script/run.py --test --dataset 3rscan --checkpoint [path to checkpoint] --n_beams 5 --weight_2d 0.5 --clip_model OpenSeg --node_model ViT-L/14@336px --blipWe use the CLIP ViT-L/14@336px to query object classes from the node embedding. Use --n_beams to adjust the beam search for the LLM relationship output and --weight_2d to adjust the 2D-3D features fusion. A value of 0.0 indicates a prediction from 3D features only
Citation
If you find our code or paper useful, please cite
@inproceedings{koch2024open3dsg,
title={Open3DSG: Open-Vocabulary 3D Scene Graphs from Point Clouds with Queryable Objects and Open-Set Relationships},
author={Koch, Sebastian and Vaskevicius, Narunas and Colosi, Mirco and Hermosilla, Pedro and Ropinski, Timo},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month={June},
year={2024},
}License
Open3DSG is open-sourced under the AGPL-3.0 license. See the LICENSE file for details.
For a list of other open source components included in Open3DSG, see the file 3rd-party-licenses.txt.