-
Thanks for your great work. While using the code in the `ali-dev` branch, I encountered a potential bug when merging objects in SLAM.
In `utils.py` at line 275
https://github.com/concept-graphs/…
-
I have setup turtlebot3 with velodyne lidar in gazebo and I can view the pointcloud in rviz2, and also checked the topics being published where imu_raw is also present. When i start scanmatcher I get …
-
Dear author,
After running the code on the sample video, I also found some other videos on the web to test. Some videos with large lens movements can run normally, but some videos with fixed lenses…
-
Hello! Thank you very much for your work. When I successfully compiled and ran this demo, the terminal reported an error:
draco_slam/src/draco_slam/multi_robot_slam.py", line 1320, in merge_trajector…
-
-
As in previous topics, I faced a similar problem. Ubuntu 20, ros noetic. I've tried all the tips from #4. I was running from under docker. I built h2o from sources. But the problem remained.
```
…
-
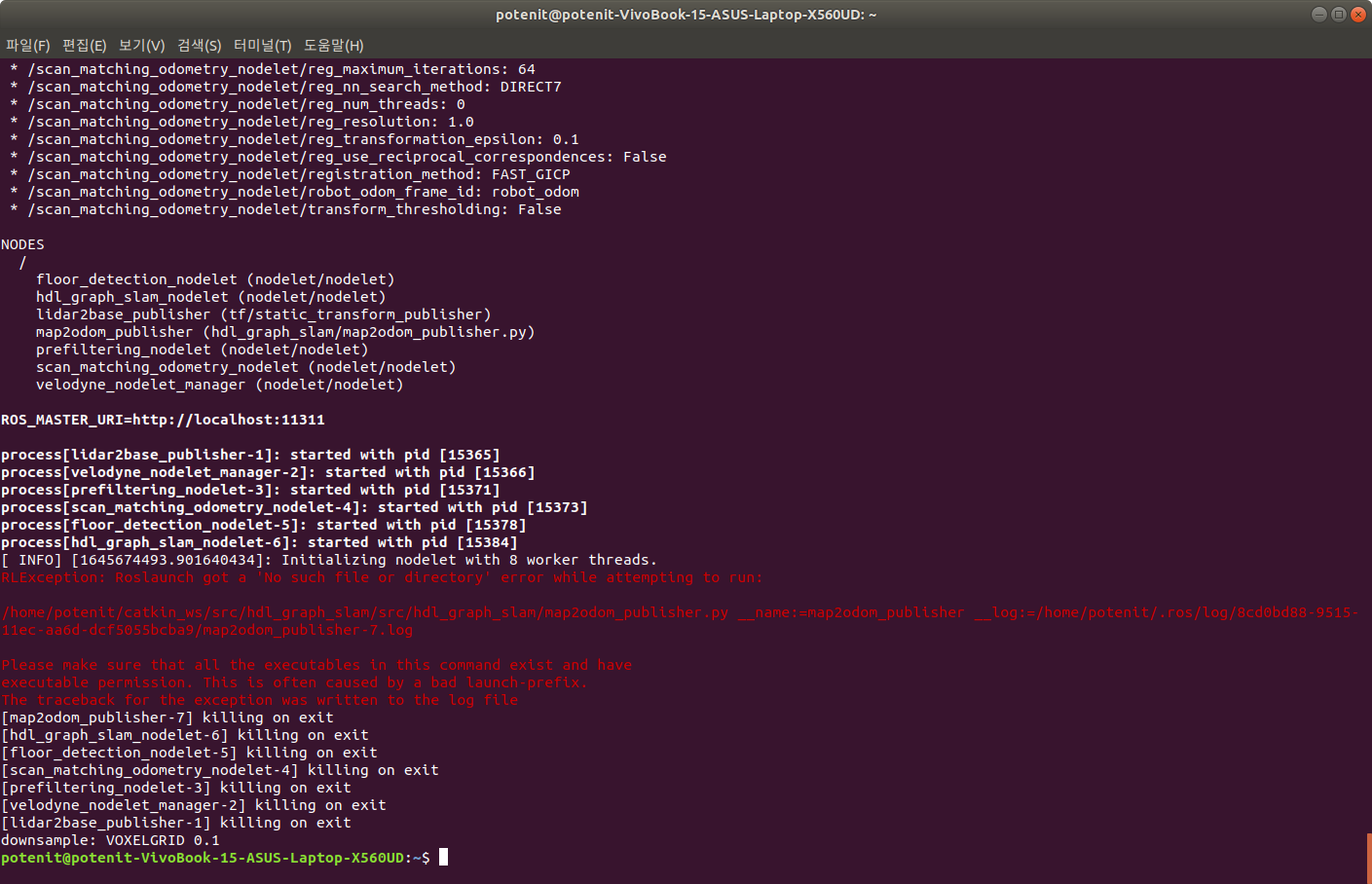
Hi guys,
I got this error when I tried to launch the "hdl_graph_slam_xxx.launch" files (on both 400 and 501 bags, the g2o version is the one mentioned on the README file)
***********************…
-
Hi Koide,
I have error in comment roslaunch hdl_graph_slam hdl_graph_slam_400.launch,
RLException: [hdl_graph_slam_400.launch] is neither a launch file in package [hdl_graph_slam] nor is [hdl_grap…
-
1. roslaunch hdl_graph_slam hdl_graph_slam_501.launch
Please tell me how to fix the…
-
Hi!
Do you have any opinion about LIO-SAM (https://github.com/TixiaoShan/LIO-SAM) and its derivatives?
For example this paper: https://www.researchgate.net/publication/362466555_Evaluation_and_c…