-
Hi, i modify and run the code of the sketch of kriswiner, and i have the problem what when i rotate the IMU (i use the MPU9250 and Arduino Pro mini 3.3 volts 8 Mhz) about one axis angles obout the ot…
-
I am unable to obtain the accuracy of the raw sensors despite having them enabled. `data->header` never has the header2 bit set and hence the values of the I have tried rolling back to the library ve…
-
For visual inspection and labeling of a time series, I would like to have the possibility to plot more than one time series in the same channel.
One is the actual signal that I want to label and the …
-
## Report work in 2 weeks (April 25 - May 8)
### Hardware:
- Get six Hi229 sensors (HiPNUC supports all costs, Hi229 + Mother Board + shipping)
- Supported hardware: six sensors are connected to …
-
(What is an IMU? [Inertial measurement unit - Wikipedia](https://en.wikipedia.org/wiki/Inertial_measurement_unit))
We will need add an IMU if we want to get better bearing measurements.
-
In utils_numpy_filter.py.
The body velocity computation seems wrong?
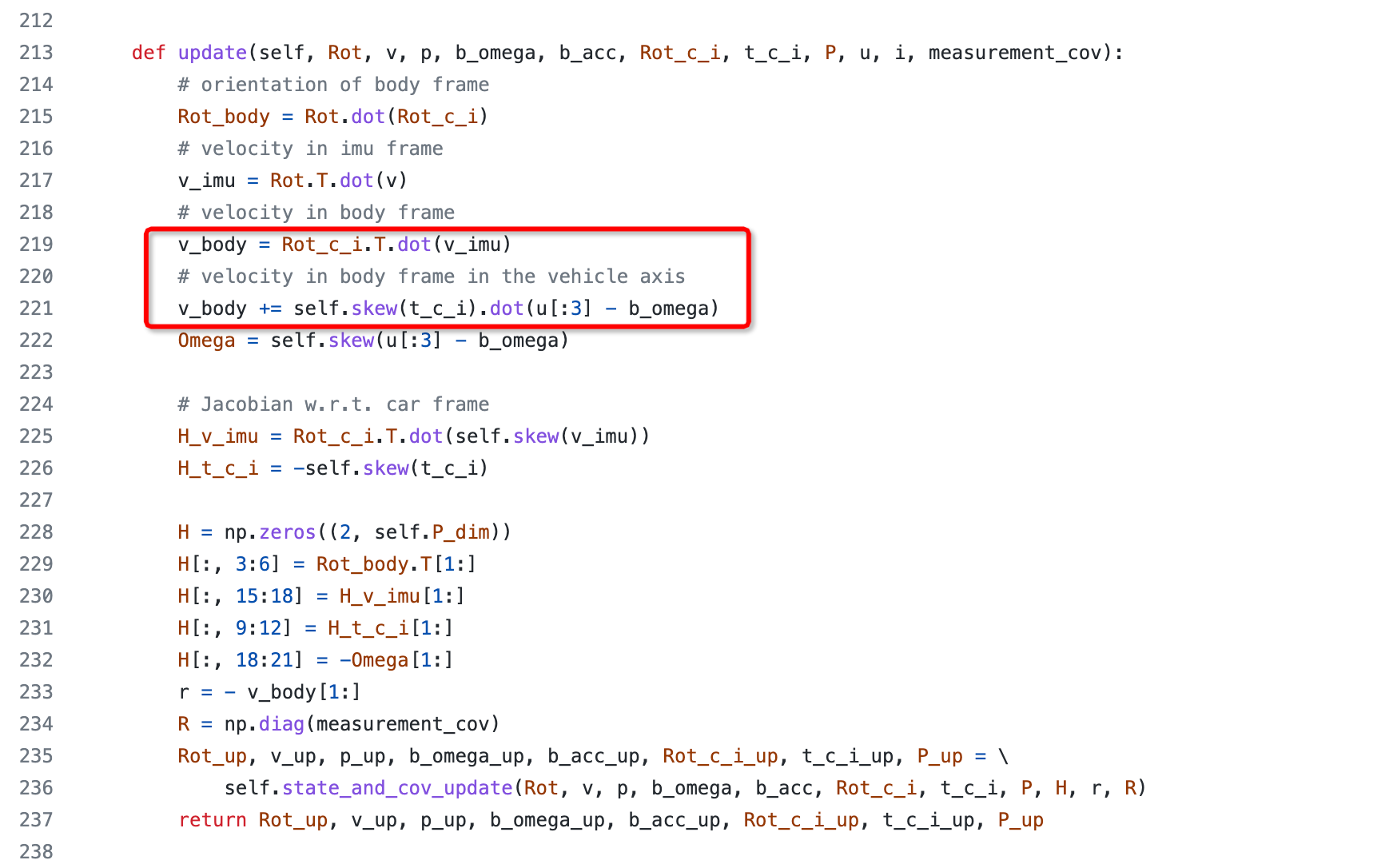
the formula in p…
-
### Describe the bug
Reported acceleration levels are extreme when PX4 is run on a Cube Orange or Cube Orange +. Flight test results from both showing high acceleration can be found [here](https://…
-
Hello,
I just bought a N100 IMU and after a lot of trying, it seems serial is working incorrectly. When I use your code to get something published, If i use any other baud rate I can see weird val…
-
-
## Describe the bug
I use optitrack as an external position reference, but it seems that ekf is not using position data.
## To Reproduce
follow the [guide](https://docs.px4.io/main/en/ros/externa…