-
I have encountered a problem in the iDynTree inverse kinematics (based on IPOPT) defined [here](https://github.com/robotology/idyntree/blob/master/src/inverse-kinematics/src/InverseKinematicsData.cpp)…
-
Follow up of https://github.com/ros-infrastructure/rosdep/pull/699
Should rosdep detect any package with a `package.xml` file or only packages registered in the ament index?
Currently it success…
-
**Is your feature request related to a problem? Please describe.**
For many analyses, it's super nice to have a way to align the animal such that the centroid is at the origin and the head is aligned…
talmo updated
3 weeks ago
-
Hello, thank you very much for doing this.
I love you all. Inverse kinematics is bothering me
But the link you provided in the pdf cannot be accessed. :(
-
您好,很抱歉打扰您,我使用prepross.py处理dip_imu数据集,生成train.pt,test.pt,以前八个受试者作为训练集,后两个作为测试集进行训练,代码如下
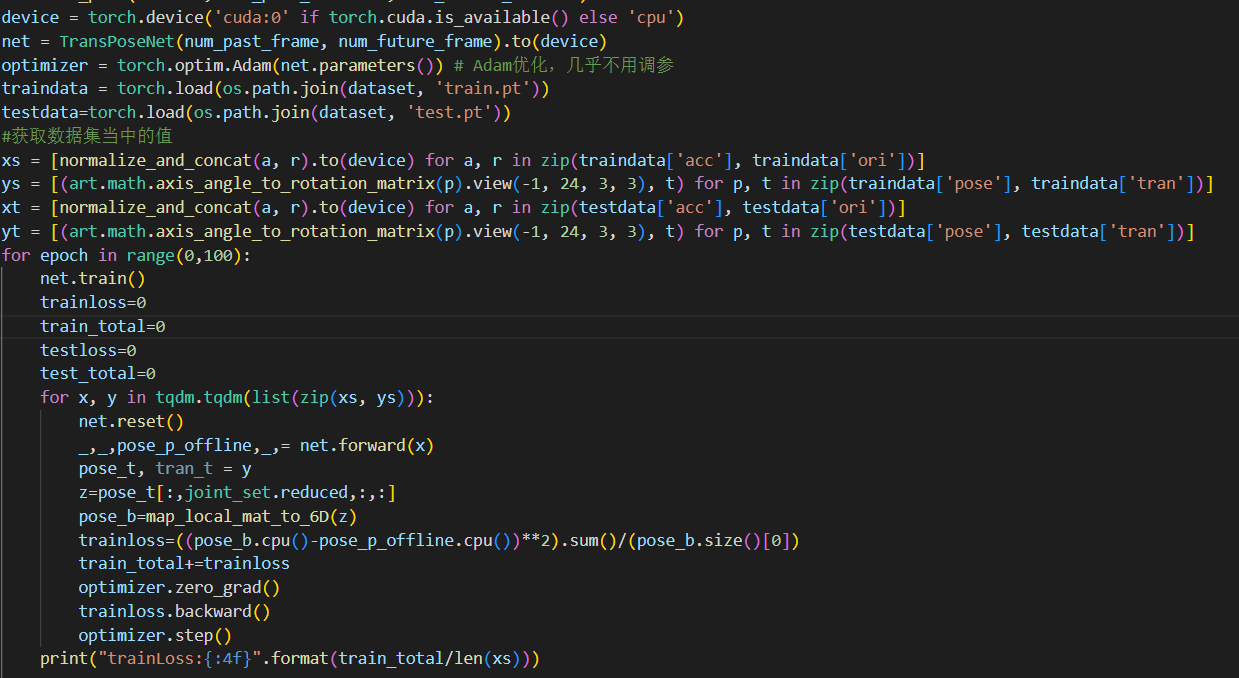
…
-
### Feature summary
Hi,
we just finished the mechanical setup of the second version of our machine. Today a read the kinematics calibration from the new arms and applied them to the URDF.
Inte…
-
Hi everybody,
Could we imagine that you import IBM RPP features ? The pattern driven programming accelerate and standardize the code.
I have it currently under iDz.
https://www.ibm.com/docs/en/rp…
-
@SalvoVirga @marcoesposito1988 @gavanderhoorn @tdinesh @rkojcev @adeguet1 @haudren @gergondet
# robot structure, states and commands
**Goal:**
Define new messages, or determine the correct e…
-
@WJHildreth reports in #249 that several ini variables are either undocumented or unused.
Casual inspection shows that [EMCMOT]TRAJ_PERIOD is documented but not used. The trajectory planner runs a…
-
I've been exploring Kiri:Moto for a few days now - it's been excellent for sending prints to my CR30 belt 3D printer where most other slicers don't really have a well lit path.
I'd love to also use…