-
Is it applicable for real robot and how? Can I test them especially RRTs in real robot, also user_config.yaml have world parameter , this is for gazebo.
-
### The problem
Hi to all,
I have a Renault Megane eTech, and use the Renault Integration, but in the sensor I cannot see
"chargingInstantaneousPower" with this sensor I can see the Power Charge o…
-
I'm having trouble getting the franka_ros_interface to connect with my real robot.
What I've done so far
1. updated the franka.sh file such that FRANKA_ROBOT_IP="172.16.0.2", your_ip="172.16.0.1…
-
> _This is a Bisq Network project. Please familiarize yourself with the [project management process](https://bisq.wiki/Project_management)._
## Description
Based on the idea proposed at https://gi…
-
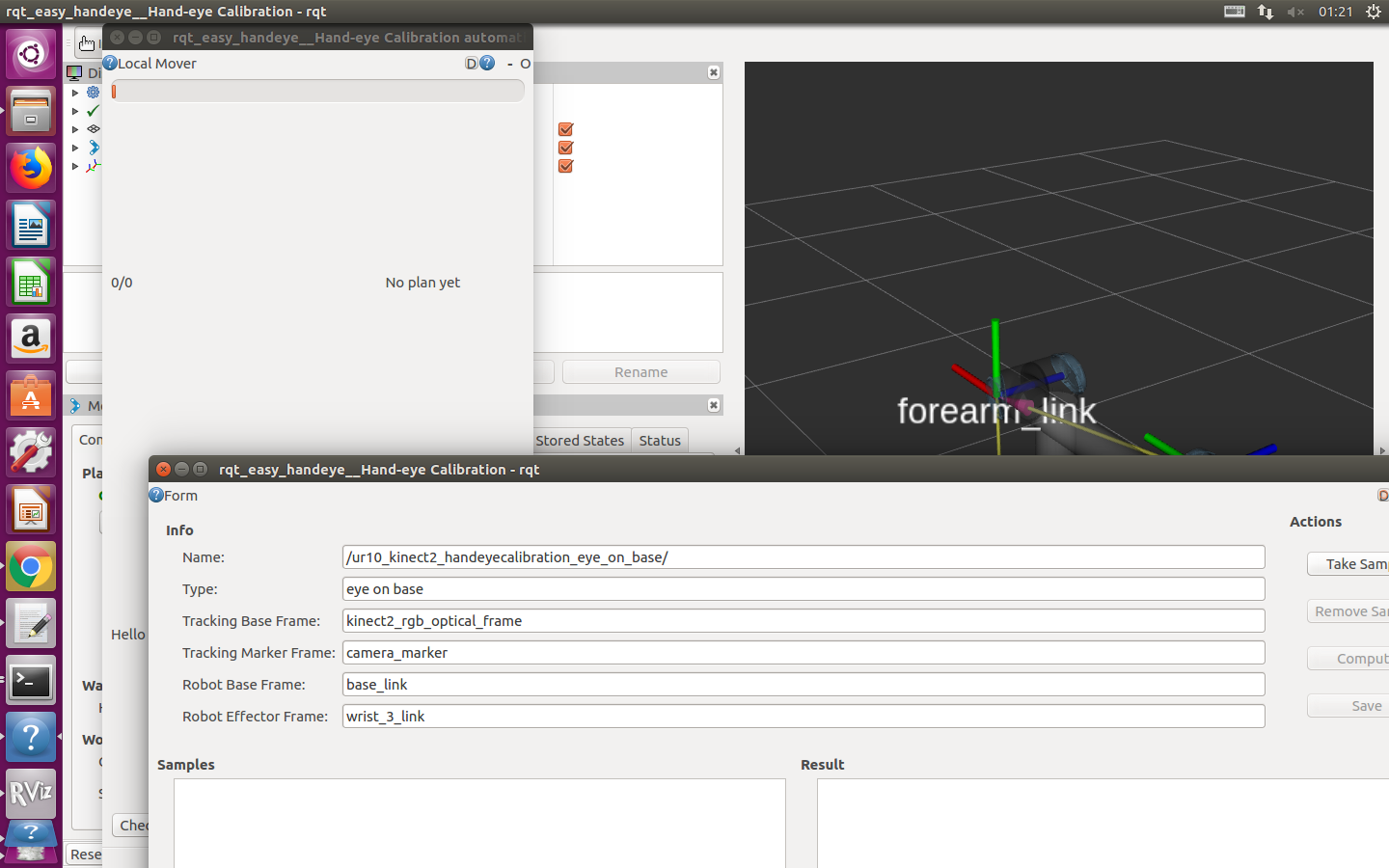
If I click takesample, I will report an error. I don't know the reaso…
-
Hi All,
I have a new Doosan A0509s arm. I am trying to run it using ROS.
The virtual mode works and launches properly when using the following -
`roslaunch dsr_launcher dsr_moveit.launch mode…
-
## Description
Hi everyone,
I'm using a Kinova Jaco2 mod. j2s7s300
ROS Melodic 18.04
I wish to save and load a PRMstar map, so I wrote something like this into ompl_planning.yaml:
Persisten…
-
### Describe the issue
import asyncio
from bimmer_connected.account import MyBMWAccount
from bimmer_connected.api.regions import Regions
async def main():
account = MyBMWAccount('xxxxx', 'x…
-
Hi, i want to use the st-rrt* planner from the ompl lib, but it seems it is not integrated in the python version? Or if it is, whats its planner name ?
-
Hey, I saw your code it is an excellent implementation. I have a question on what kind of graph/grid you applied. is it visibility graph,Sukharev grid?
Thank you