Isaac ROS Argus Camera
ROS 2 packages based on NVIDIA libArgus library for NVIDIA-accelerated CSI camera support.


Overview
The Isaac ROS Argus Camera module contains an ROS 2 package for sensor processing to output images. Image sensors are connected on CSI and GMSL hardware interfaces to Jetson platforms. This package uses dedicated hardware engines to accelerate image processing. Output images are used in graphs of nodes for AI and CV perception packages, image compression for capture to disk by event recorders, and live-stream visuals for remote robot teleoperation.
Isaac ROS Argus Camera provides with several sensor capture and processing features, including AWB (auto-white-balance), AE (auto-exposure), and noise reduction. Leveraging hardware engines in Jetson, Argus provides multi-camera frame synchronization, with very high precision frame acquisition timestamping and jitter less than 100us.
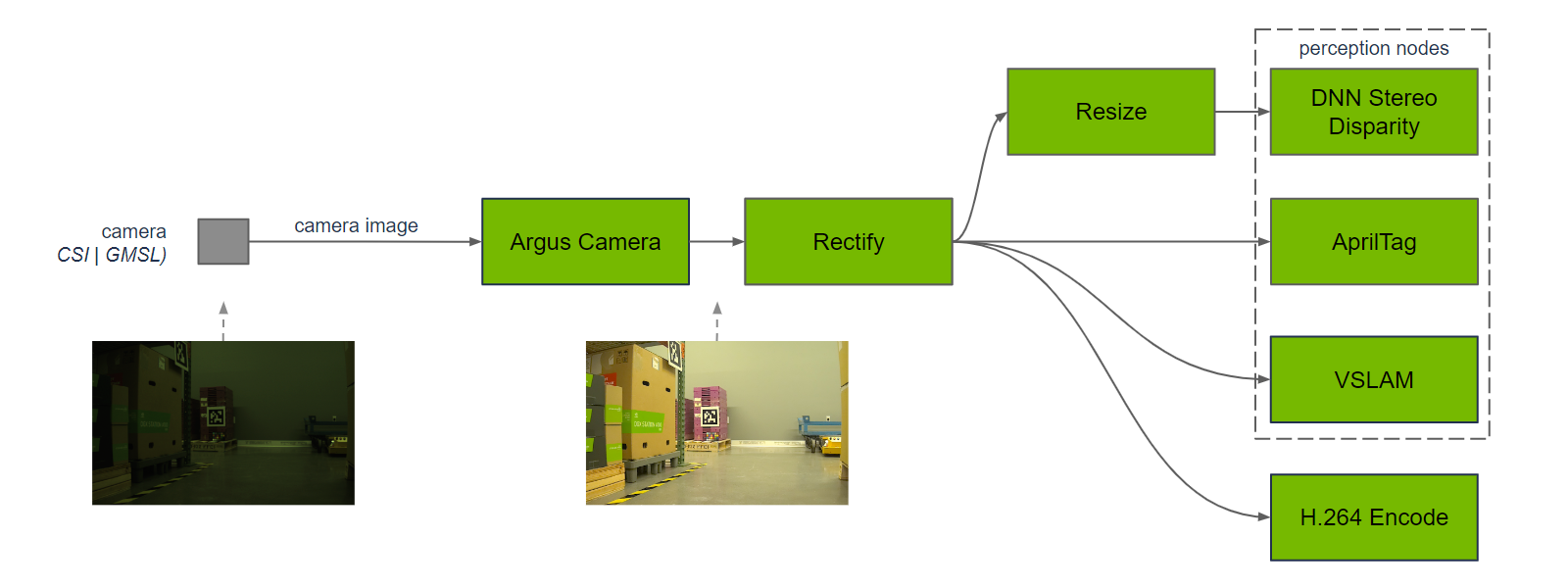
In the example graph of nodes above, the Argus Camera module processes sensor image data from the camera for input to vision-based perception graphs, including DNN stereo disparity, AprilTag, VSLAM, and H.264 encode. Each of the nodes in green is GPU accelerated for a high-performance compute graph from Argus camera to vision-based perception functions.
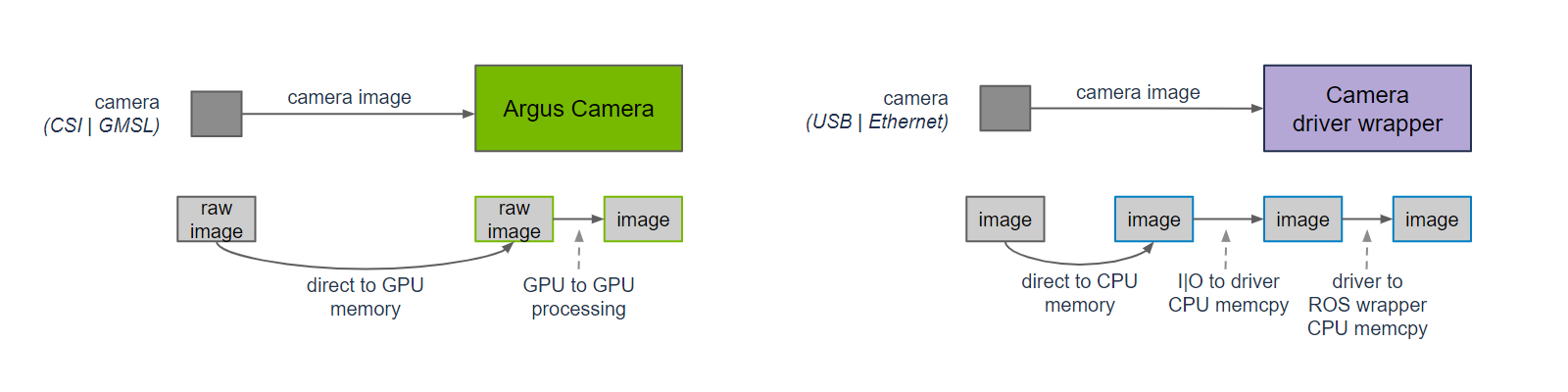
Argus Camera uses dedicated hardware engines to access the full memory bandwidth in Jetson. Raw camera images are delivered via CSI or GMSL interfaces directly to the GPU accelerated memory. The ISP hardware processes the raw image directly into a GPU accelerated output image topic.
Widely available USB and Ethernet plug-in cameras can be used for robotics applications, but there is performance cost for this convenience. The I/O interface (USB or Ethernet) places the image from the camera directly into CPU-accessible memory. The camera driver makes a copy from the I/O interface using the CPU to make the image available to other applications. The Camera driver wrapper node in ROS performs another memory copy with the CPU from the driver to publish the image in ROS. Before a USB or Ethernet image arrives as a published topic, two CPU memory copy actions have been performed for every pixel. In contrast, the Argus Camera module processes sensor data into output image topics in ROS without the CPU touching a single pixel in the image.
[!Note] Argus Camera outputs
sensor_msgs/Imageat the sensor data rate, subject to performance capabilities of the Jetson platform(s). For example, a Hawk camera configured for 30fps (frames per second) stereo 1920x1080 will output time-synchronized left and right camera framessensor_msgs/Imageat 30fps.[!Note] Argus Camera is not supported on x86_64 platforms with discrete GPUs that do not have a CSI or GMSL interface to connect to a camera.
[!Note] See Argus for more information on camera processing.
Documentation
Please visit the Isaac ROS Documentation to learn how to use this repository.
Packages
Latest
Update 2024-09-26: Updated for Isaac ROS 3.1