-
According to my experience in installing arena-bench for several computers, I notice that some of them lack ros packages: costmap_converter, mbf_costmap_core, mbf_msgs...
Perhap the setup.sh might in…
-
Should be straight forward: check the future trajectory from the graceful controller for collisions, ignoring within some tolerance of the dock itself (since we're making or in contact there). We can …
-
这个问题怎么解决
[ WARN] [1721482204.267190101, 30.213000000]: No laser scan received (and thus no pose updates have been published) for 30.213000 seconds. Verify that data is being published on the /scan t…
t1tqq updated
2 weeks ago
-
I have been following along with [this](https://navigation.ros.org/setup_guides/sensors/setup_sensors.html) tutorial, and gotten to the section regarding visualization of costmaps. However, at this po…
-
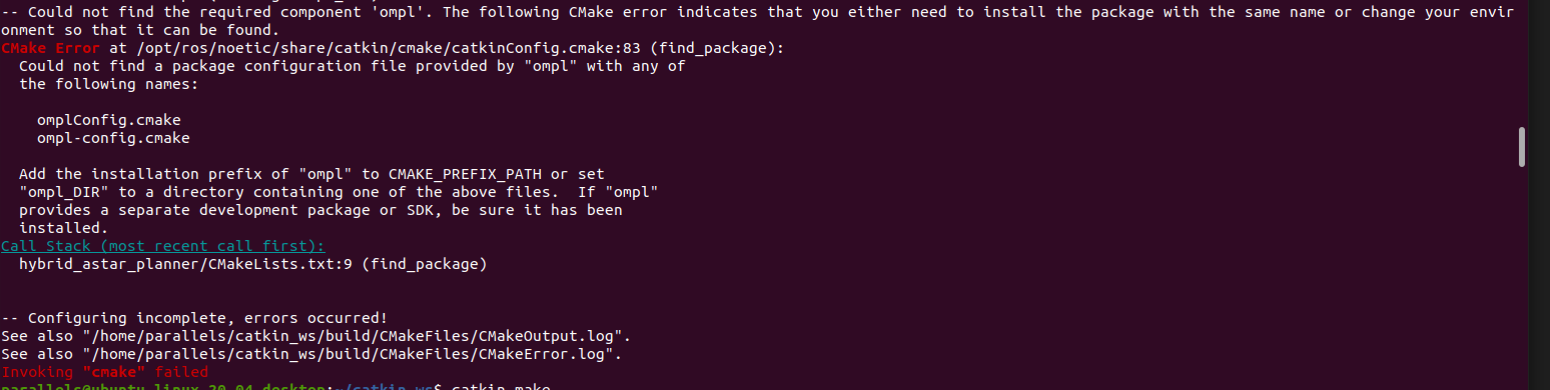
It should use
```
find_package(catkin REQUIRED COMPONENTS
geome…
-
-
excuse me ,could you please help me to resolve a question,which is that how to make a costmap such as the topic "/move_base/global_costmap/costmap" map,just use the ros move_base package ,or make it b…
-
I'm having trouble with the navigation stack. When I make a waypoint, my robot starts jerking around; no smooth movement. Today the robot fell over because of this. Any idea on what could cause this? …
-
hi when i run
`roslaunch mbf_beginner amcl_demo_relay_subscriber.launch`
i get `ERROR: cannot launch node of type [mbf_costmap_nav/mbf_costmap_nav]: Cannot locate node of type [mbf_costmap_nav] in…
-
I am using ros-melodic on a jetson nano (ubuntu 18.04)
I've git cloned the package hector_navigation
in my catkin_src I ran catkin_make and source devel/setup.bash without issue
then I ran:
I did …