-
**Camera resectioning—extrinsic calibration**
Repo: https://github.com/SheffieldMLtracking/alignment
Camera calibration (finding camera pose/extrinsic position) — some code already ([beelabel alignme…
-
The `storeCalibration` function in `calibrationManager.js` needs to be implemented. This function should dot the following:
- [ ] Generate an extrisics.txt file (which is currently done in the functi…
-
I wonder, why the IMU is not calibrated by factory configuration. Could you at least provide some "factory spec" one, which I could upload to eeprom? In eeprom we now only have
```
"imuExtrinsic…
-
We need to very carefully define the transformations between the sensors. This will mean we need to VERY CAREFULLY mount the sensors and measure their relative transformations somehow.
-
Hello
The following TF frame is from **Basement_1.bag**
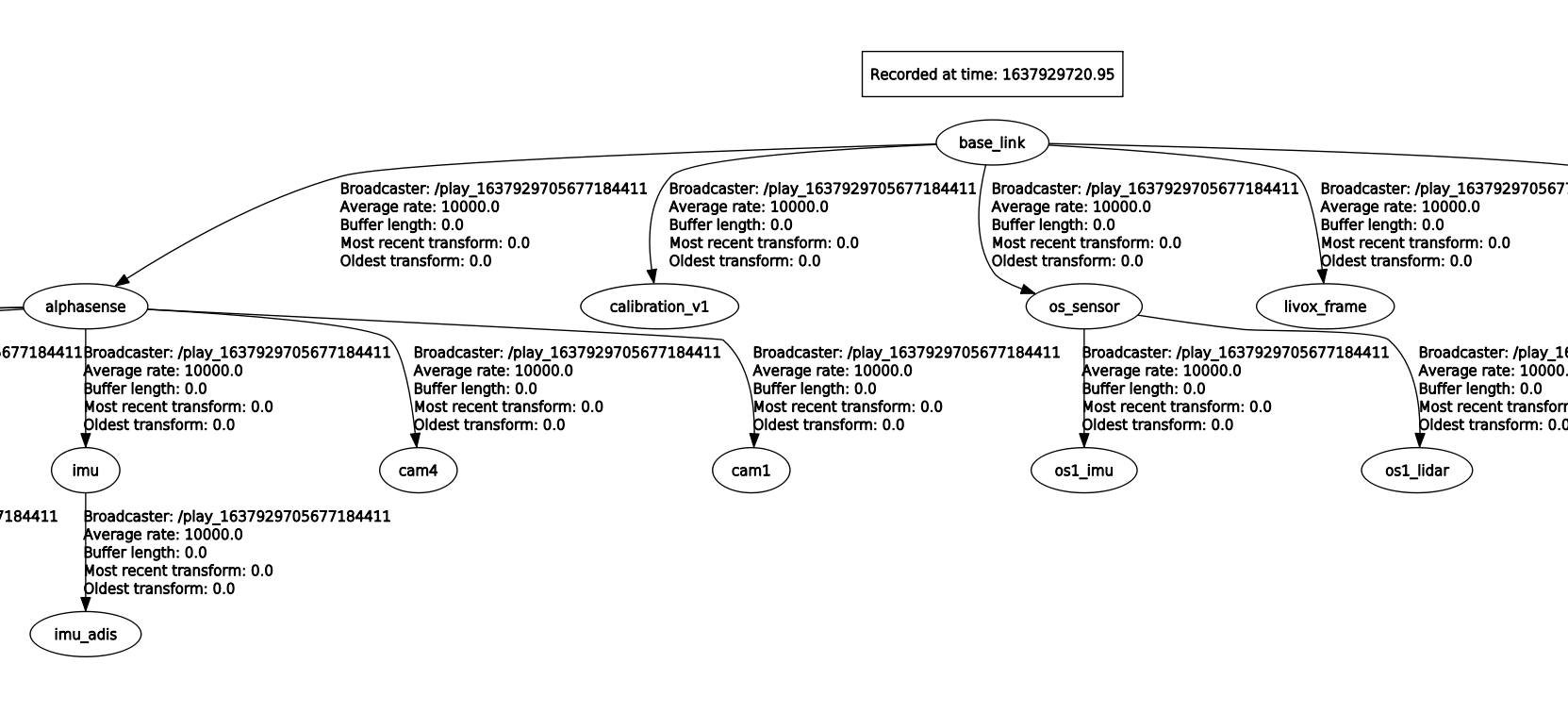
and the following TF fr…
-
We use different function to read the extrinsic calibration file of one experiment. (read_calibration_gps_prism, read_calibration_gps_prism_lidar, read_calibration_prism_lidar_marmotte). See if it is …
-
Hi, We would like to use the aniposelib to do multiple camera calibrations. but now we meet serval problems. I wonder if there are any good suggestions:
1. we have 6 cameras, and some are opposite …
-
### What feature or enhancement are you suggesting?
Exposing camera intrinsic parameters to JS. This thread: https://github.com/mrousavy/react-native-vision-camera/issues/2998 referenced grabbing c…
-
hi, thanks for sharing this repository. however, i do find the code of lidar2camera calibration does not match with what has been described in your paper.
1. p3l is mentioned to be used for coarse c…
-
We used Kalibr to calibrate the IMU and camera extrinsic parameters of the ZED 2i camera. By adjusting the noise parameters, the algorithm successfully converged, but there was a significant differenc…