-
The various tests assume that we can read and write files to /tmp.
It has been suggested in: https://github.com/ros/ros_comm/pull/510 that this be changed to make use of the tempfile module instead.
-
I want to compare the estimated pose with the ground truth pose using ov_eval. The dataset that I am using is the EuRoC dataset. I am recording a rosbag of the estimated pose data (/ov_msckf/poseimu) …
-
This patch provides a client server interface for pausing recording and querying the recording status of rosbag record
http://ros-users.122217.n3.nabble.com/rosbag-patch-for-pausing-recording-and-st…
-
How can we convert PCD or rosbag to the format this tool need?
-
Could you please explain how I can run this script to take point cloud data from a rosbag as an input to generate a gazebo world?
-
Hello
The following TF frame is from **Basement_1.bag**
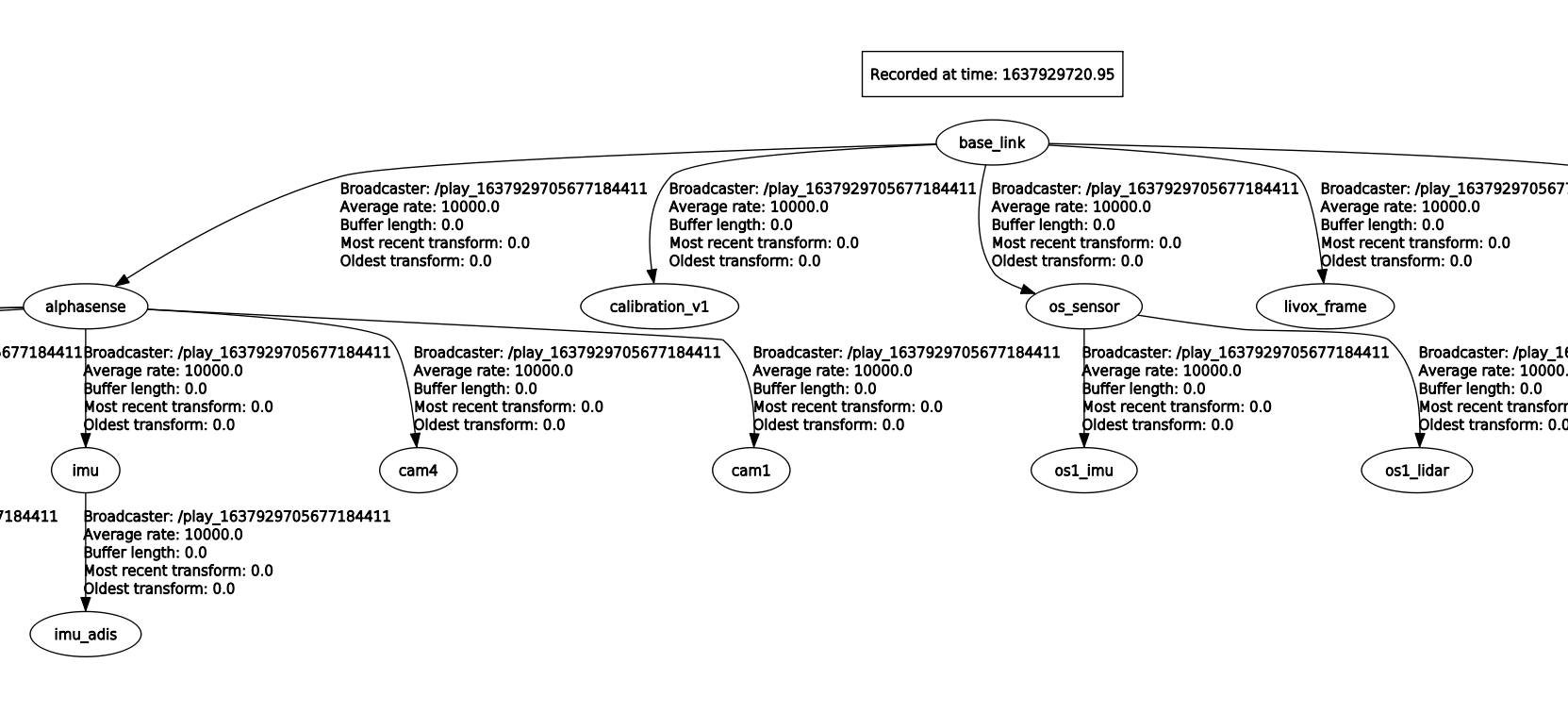
and the following TF fr…
-
**Hello,
when I run the command "catkin build rovio --cmake-args -DCMAKE_BUILD_TYPE=Release " I get the following:**
/home/shrey/rovio_workspace/src/rovio/include/rovio/ImgUpdate.hpp: In member func…
-
你好,rosbag数据包是否应该放在容器环境下才能使用?
~/桌面/rosbag$ rosbag play demo-2.0.bag --clock
[ INFO] [1626150183.325881367]: Opening demo-2.0.bag
[rospack] Error: package 'rosbag_storage' not found
[librospack]: er…
-
I'm using cartographer to get the 3D-localization for a copter. As the copter shall start after some waiting time, it is standing still on the ground for some minutes. Unfortunately the pose that ca…
-
- [ ] A script that records vision topics in one bag, records all other topics in another bag, and names the bags with the start timestamp
- [ ] A script that copies new bags from the Jetson NVME driv…