-
Hello @RomanRobotnik,
We have two RBKAIROS units in the iCORE Lab at Louisiana State University. We are working on a large scale project and need to bring all systems (summit_xl, 3d reconstruction,…
-
Dear maintainers,
is it possible to have a ros2 driver for microScan3 Pro - EtherCAT based on https://github.com/ICube-Robotics/ethercat_driver_ros2 ?
Thanks!
-
Hello, I am currently having difficulty sending service input to set the monitoring case when running the package sick_safetyscanners on ROS. I have configured on Safety designer software with 2 monit…
-
Hi everyone!
I'm using Sick Microscan3 and ROS IPC. I want to use lidar for Lidar-loc and run package sick_safetyscanner.
But, when I run MS3 with Lidar-loc first. It's OK.
Then, I run package Sic…
-
Is it possible to receive data from microScan3, nanoScan3 and outdoorScan3 (in ROS) while also employing OSSD?
-
Dear colleagues,
I forward this question from @nguyendo1403 about switching the monitoring case of the mS3 using the ROS driver.
Thanks in advance.
Best regards,
Pablo
> Hi Pablo …
-
Hello,
the nanoScan offers 2 channels to provide measurement data to 2 targets.
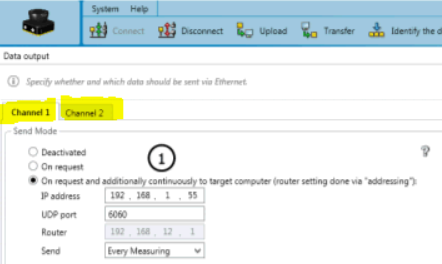
…
-
HI, I use ROS for my AGV,and install sick_lidar_localization and sick_safetyscanner from github. So I need both SIM result data and laser scan data at the same time. But when I run both of them, the c…
-
Hello,
with the current driver I could not acquire scan data from two microScans3 at two receivers.
Please, refer to the attached pptx for more detailled description.
[LiDAR-LOC_ROS_test.pp…
-
this might be connected with #48
The response to the /field_data service contains for each field:
```
ranges: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.069000005722046, 1.069000005722046, 1.06900000572204…