-
CMakeFiles/rgbdslam.dir/src/openni_listener.cpp.o: In function `OpenNIListener::processBagfile(std::__cxx11::basic_string, std::__cxx11::basic_string const&, std::__cxx11::basic_string const&, std::__…
-
I want to integrate the LiDAR-based perception results into the odometry calculations. To evaluate the accuracy of the algorithm, I hope to obtain the ground truth from the dataset. Does your dataset …
-
Hello,
after a successful geometric calibration with my own data we are trying to get your temporal calibration running.
It seems to work, but the results seem to be quite instable, kind of "rand…
-
Hi,
Do you happen to know how to show the KITTI label in rosbag? I want to show the bounding box together with the point cloud. And all I can find is the velo2rosbag, img2rosbag staff. No one actuall…
-
Hello,
Thank you so much for providing these datasets!
I was hoping to use the latest available rosbag for the market dataset but it seems to be missing the laser scans. Is there somewhere else …
-
I have downloaded the rosbag and have set the directory as MATLAB path.
However, when I run the example code it gives the error as shown in the title.
I also tried to move the files in the src folde…
-
As the docker-compose files get more and more complex, it becomes harder to debug a failure in any one of the containers. All of the terminal logging is on top of each other.
Therefore there shoul…
-
Hello, dear author, thank you very much for providing the joint calibration tool. I have a question that I need to ask you, as follows.
**Describe the bug**
I generated a bag package myself using …
-
Hello
The following TF frame is from **Basement_1.bag**
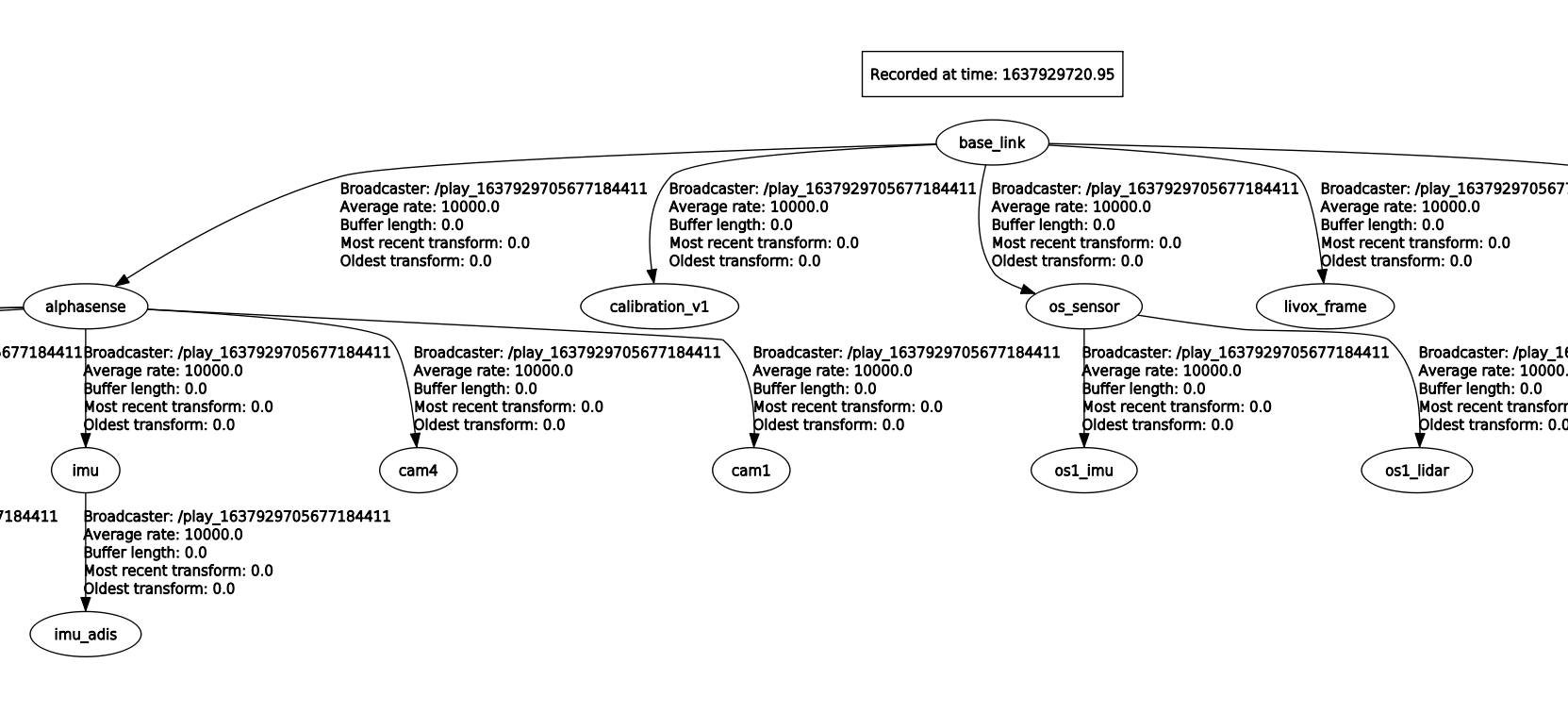
and the following TF fr…
-
I am a beginner, if you by pass, please take a look, many thanks!
I want to use FAST_LIO, but first I have to calibrate time.
lidar:livox mid-70
IMU:wit JY901B
I followed the readme to operate s…
nw-wf updated
4 months ago